


化工儀器網(wǎng)>產(chǎn)品展廳>實(shí)驗(yàn)室常用設(shè)備>其它實(shí)驗(yàn)室常用設(shè)備>其它實(shí)驗(yàn)室設(shè)備>ErgoSIM 人機(jī)共駕智能駕駛模擬器









ErgoSIM 人機(jī)共駕智能駕駛模擬器
具體成交價(jià)以合同協(xié)議為準(zhǔn)
- 公司名稱 北京津發(fā)科技股份有限公司
- 品牌 津發(fā)科技
- 型號(hào) ErgoSIM
- 產(chǎn)地
- 廠商性質(zhì) 生產(chǎn)廠家
- 更新時(shí)間 2024/8/20 21:04:12
- 訪問(wèn)次數(shù) 3526
聯(lián)系方式:王先生13021282218 查看聯(lián)系方式
聯(lián)系我們時(shí)請(qǐng)說(shuō)明是化工儀器網(wǎng)上看到的信息,謝謝!
虛擬現(xiàn)實(shí)仿真實(shí)驗(yàn)室|眼動(dòng)儀|心理學(xué)實(shí)驗(yàn)室|EEG/ERP腦電儀|事件相關(guān)電位系統(tǒng)|多導(dǎo)生理儀|行為觀察分析系統(tǒng)|人機(jī)環(huán)境同步平臺(tái)|人機(jī)工程儀器設(shè)備|人因工程儀器設(shè)備|人機(jī)交互實(shí)驗(yàn)室|人機(jī)工效實(shí)驗(yàn)室|人機(jī)工程實(shí)驗(yàn)室|人因工程實(shí)驗(yàn)室
| 產(chǎn)地類別 | 國(guó)產(chǎn) | 應(yīng)用領(lǐng)域 | 交通,航天,汽車,綜合 |
|---|
一、實(shí)驗(yàn)室簡(jiǎn)介
ErgoSIM人機(jī)共駕智能駕駛模擬器
系統(tǒng)是北京津發(fā)科技股份有限公司基于“人-機(jī)-環(huán)境”和“人-信息-物理”系統(tǒng)理論,自主創(chuàng)新與配置的針對(duì)交通安全領(lǐng)域的智能交通研究的一種方法。
ErgoSIM人機(jī)共駕智能駕駛模擬器
以ErgoLAB人車路環(huán)境測(cè)試云平臺(tái)為核心,通過(guò)實(shí)時(shí)同步采集多維度人、車、路、環(huán)境數(shù)據(jù),分析不同環(huán)境與任務(wù)下人員的狀態(tài),進(jìn)而對(duì)智能系統(tǒng)進(jìn)行評(píng)價(jià)優(yōu)化。
二、實(shí)驗(yàn)室構(gòu)成
ErgoLAB人機(jī)共駕智能模擬實(shí)驗(yàn)室由包含主控觀察室(Control Room)和若干間 駕駛模擬測(cè)試室(Simulation Testing Room)或者虛擬現(xiàn)實(shí)實(shí)驗(yàn)室(VR/Simulation LAB)分別布置如下三大實(shí)驗(yàn)平臺(tái):1、交通場(chǎng)景編輯與自動(dòng)駕駛仿真平臺(tái)主要布置在主控觀察室、2、基于駕駛模擬器的 多模態(tài)數(shù)據(jù)同步采集平臺(tái)分別布置在實(shí)驗(yàn)測(cè)試室、3、多模態(tài)數(shù)據(jù)分析與人工智能應(yīng)用平臺(tái)主要布置在主控觀察室。
1、人機(jī)共駕智能模擬實(shí)驗(yàn)室(交通安全與駕駛行為研究方向、智能座艙HMI人機(jī)交互評(píng)估、自動(dòng)駕駛仿真驗(yàn)證評(píng)估、ADAS/AD算法仿真驗(yàn)證、DMS測(cè)試)
2、車輛人機(jī)工程虛擬仿真實(shí)驗(yàn)室(車輛人機(jī)工程設(shè)計(jì)與仿真、基礎(chǔ)人機(jī)工程研究:人體測(cè)量學(xué)與生物力學(xué)測(cè)試、HMI智能人機(jī)交互模擬測(cè)試、ADAS HUD人機(jī)界面工效測(cè)試)
3、駕駛行為試驗(yàn)車(自然駕駛行為研究、自動(dòng)駕駛測(cè)試驗(yàn)證、、DMS測(cè)試)
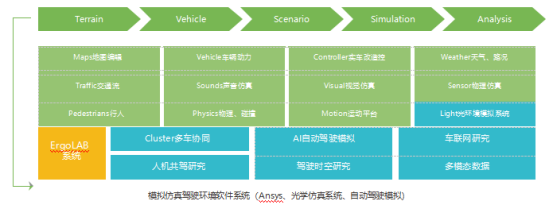
ErgoSIM人機(jī)共駕智能駕駛模擬器系統(tǒng)由ErgoLAB人車路環(huán)境測(cè)試云平臺(tái)、ErgoLAB人車路環(huán)境綜合數(shù)據(jù)分析平臺(tái)、交通場(chǎng)景模擬與自動(dòng)駕駛駕駛仿真驗(yàn)證平臺(tái)、模擬仿真駕駛環(huán)境系統(tǒng)構(gòu)成。

3交通場(chǎng)景模擬與自動(dòng)駕駛駕駛仿真驗(yàn)證平臺(tái)
Ansys VRX是一個(gè)全面的交通場(chǎng)景仿真軟件套件,包含實(shí)時(shí)車輛模型開發(fā)、實(shí)時(shí)動(dòng)畫軟件開發(fā)、虛擬駕駛環(huán)境開發(fā)以及完備的解決方案。系統(tǒng)提供構(gòu)建超逼真虛擬世界所需的所有工具和模型:交通場(chǎng)景模型、傳感器模型、駕駛員模型、TA 自動(dòng)化測(cè)試、TADAS控制算法仿真集成、車輛模型、場(chǎng)景DEMO,以及完整的光環(huán)境模擬數(shù)據(jù)庫(kù)。

4模擬仿真駕駛環(huán)境系統(tǒng)
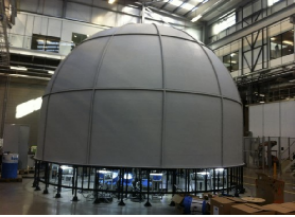
實(shí)車駕駛模擬座艙:具有真實(shí)的汽車駕駛室與主動(dòng)力反饋系統(tǒng)以及操作控制,可支持6自由度平臺(tái)。
沉浸式仿真駕駛場(chǎng)景:以視景仿真實(shí)現(xiàn)”沉浸感、交互性“虛擬環(huán)境的構(gòu)建,可實(shí)現(xiàn)180°-360°的視景輸出。真實(shí)的駕駛操縱感受:采用多自由度汽車行駛動(dòng)力學(xué)模型,精確解算每一時(shí)刻車輛的運(yùn)動(dòng)姿態(tài)。




采用仿真數(shù)據(jù)庫(kù)驅(qū)動(dòng)模擬環(huán)境,搭建環(huán)境模擬艙,進(jìn)行聲、光、振動(dòng)、微氣候等物理環(huán)境模擬,并同步采集與分析模擬環(huán)境下的多維度人機(jī)環(huán)境數(shù)據(jù)。
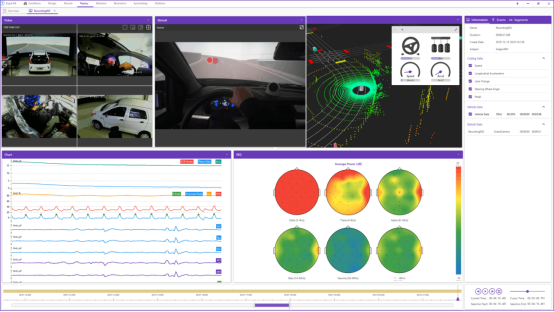
1ErgoLAB人車路環(huán)境測(cè)試云平臺(tái)
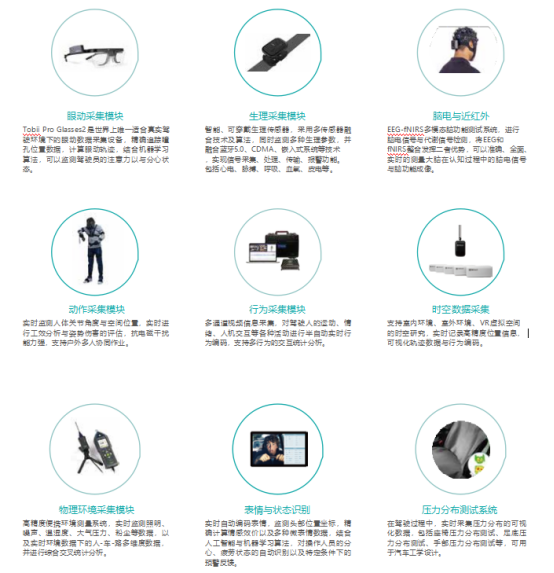
ErgoLAB人車路環(huán)境測(cè)試云平臺(tái)能同步采集人、車、路、環(huán)境的數(shù)據(jù)。駕駛員的視覺信息數(shù)據(jù)、駕駛員生理變化數(shù)據(jù)、駕駛員腦活動(dòng)數(shù)據(jù),腦電與近紅外、駕駛員行為績(jī)效數(shù)據(jù)、駕駛員動(dòng)作捕捉數(shù)據(jù)、駕駛員狀態(tài)數(shù)據(jù)、道路環(huán)境數(shù)據(jù)、車輛數(shù)據(jù)、時(shí)空數(shù)據(jù)、生物力學(xué)數(shù)據(jù)等。

2ErgoLAB人車路環(huán)境綜合數(shù)據(jù)分析平臺(tái)
ErgoLAB人車路環(huán)境綜合數(shù)據(jù)分析平臺(tái)能對(duì)人、車、路、環(huán)境的數(shù)據(jù)進(jìn)行定量化的分析。

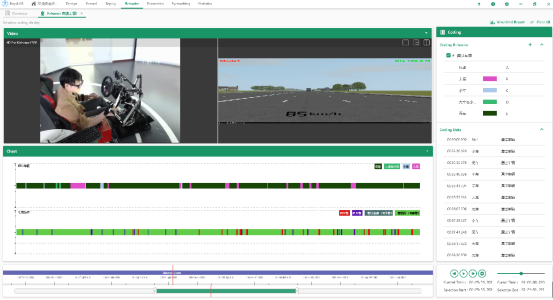
1、行為分析系統(tǒng)
系統(tǒng)實(shí)現(xiàn)行為的自動(dòng)編碼與手動(dòng)編碼,數(shù)據(jù)統(tǒng)計(jì)包括基礎(chǔ)數(shù)據(jù)統(tǒng)計(jì)(發(fā)生時(shí)間、頻次等)、行為交互分析(兩種或多種行為同時(shí)發(fā)生的時(shí)間、次數(shù)、概率等)、行為順序效應(yīng)分析(行為之間的多層次數(shù)據(jù)統(tǒng)計(jì)),所有行為編碼數(shù)據(jù)均可進(jìn)入時(shí)空分析。
2、動(dòng)作捕捉分析系統(tǒng)
系統(tǒng)通過(guò)3D 數(shù)字虛擬人,監(jiān)測(cè)各關(guān)節(jié)位置的Flexion/Extension彎曲/伸展、Abduction/Adduc- tion外展/內(nèi)收、Rotation旋轉(zhuǎn)、AngularVelocity角速度等,實(shí)現(xiàn)對(duì)個(gè)體動(dòng)作和姿勢(shì)的實(shí)時(shí)視覺反饋,并對(duì)風(fēng)險(xiǎn)姿勢(shì)動(dòng)作自動(dòng)進(jìn)行預(yù)警。

3、時(shí)空行為分析
可得駕駛過(guò)程中可視化人跡地圖與時(shí)空熱力圖,可以直接呈現(xiàn)數(shù)據(jù)、表達(dá)現(xiàn)狀、預(yù)測(cè)趨勢(shì)。
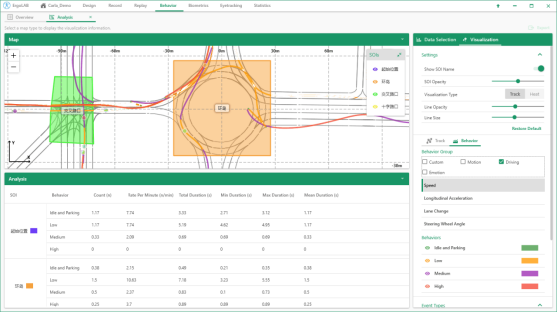
4、車輛數(shù)據(jù)分析
車輛基礎(chǔ)數(shù)據(jù)分析,包括行駛軌跡、航向角、橫擺角速度、瞬時(shí)轉(zhuǎn)向半徑、道路坡度以及質(zhì)心側(cè)偏角約束、摩擦圓約束等行駛穩(wěn)定性分析。高級(jí)分析功能,綜合計(jì)算多種數(shù)據(jù)源進(jìn)行汽車基本性能的測(cè)試分析、汽車穩(wěn)定性測(cè)試分析、加速度測(cè)試分析以及方向盤、腳踏板等測(cè)試。

5、面部表情分析
實(shí)時(shí)自動(dòng)編碼面部表情狀態(tài),包括高興、悲傷、厭惡、恐懼等,監(jiān)測(cè)頭部位置坐標(biāo),精確計(jì)算情感效價(jià)以及多種微表情數(shù)據(jù),結(jié)合人工智能與機(jī)器學(xué)習(xí)算法, 進(jìn)一步實(shí)現(xiàn)對(duì)操作人員的分心、疲勞、應(yīng)激等狀態(tài)的自動(dòng)識(shí)別以及特定條件下的預(yù)警反饋。

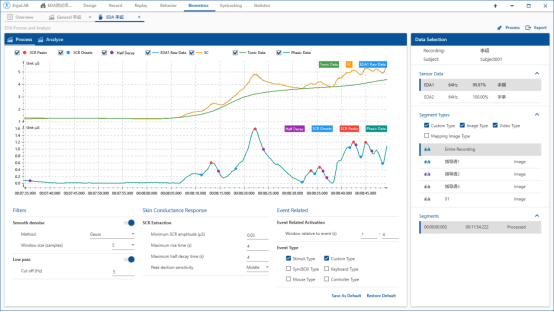
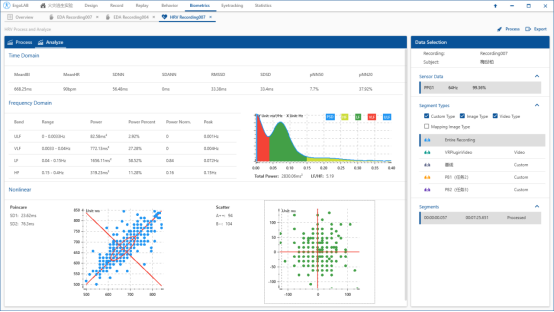
6、生理信后分析
生理分析系統(tǒng)包括HRV心率變異性分析軟件、EDA皮電分析軟件、RESP呼吸分析軟件、SKT皮溫分析軟件、EMG肌電分析軟件以及General一般性分析(環(huán)境數(shù)據(jù)、眼電數(shù)據(jù)等)軟件,并進(jìn)行時(shí)域分析、頻域分析、非線性分析、可視化報(bào)告以及信號(hào)的特殊處理與統(tǒng)計(jì)分析。
7、眼動(dòng)分析系統(tǒng)
系統(tǒng)包括眼動(dòng)處理、眼動(dòng)狀態(tài)分析( 注視、掃視、眨眼等)、可視化分析(熱點(diǎn)圖、軌跡圖、3D圖等)、AOI數(shù)據(jù)統(tǒng)計(jì)、注視AOI的序列性可視化分析以及VR-Plugin虛擬場(chǎng)景的眼動(dòng)交互數(shù)據(jù)統(tǒng)計(jì)。


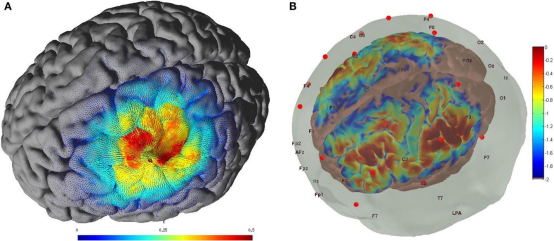
8、腦電分析系統(tǒng)
腦電分析系統(tǒng)可實(shí)時(shí)監(jiān)測(cè)個(gè)體的腦區(qū)熱圖,以及精確的信號(hào)處理與統(tǒng)計(jì)分析,包括時(shí)域數(shù)據(jù)(平均幅值、最大/最小幅值等),頻域數(shù)據(jù)(δ波、θ波、α 波、β波、γ波、自定義頻段),時(shí)-頻分析以及注意力指標(biāo)、疲勞指標(biāo)統(tǒng)計(jì),如SMR波、α/β等。

9.近紅外分析系統(tǒng)
近紅外分析系統(tǒng)可實(shí)時(shí)檢查個(gè)體的腦血氧飽和度的變化,以及精確的信號(hào)處理與統(tǒng)計(jì)分析。
三、實(shí)驗(yàn)室功能特點(diǎn)
1智能人機(jī)共駕過(guò)程中人-車-路-環(huán)境同步采集與分析ErgoSIM人機(jī)共駕智能駕駛模擬器能夠?qū)崿F(xiàn)各種車-路-環(huán)境的搭建,結(jié)合ErgoLAB人機(jī)環(huán)境測(cè)試云平臺(tái),能夠?qū)崿F(xiàn)人機(jī)共駕過(guò)程中對(duì)人-車-路-環(huán)各維度的數(shù)據(jù)的同步采集與分析,為解決人機(jī)共駕過(guò)程中的相關(guān)問(wèn)題提供助力。

2交通場(chǎng)景模擬與自動(dòng)駕駛模擬仿真環(huán)境
自動(dòng)高效的交通場(chǎng)景仿真,包含全面的交通場(chǎng)景仿真軟件套件,包含實(shí)時(shí)車輛模型開發(fā)、實(shí)時(shí)動(dòng)畫軟件開發(fā)、虛擬駕駛環(huán)境開發(fā),可實(shí)現(xiàn)不同形式的研究需要。

3結(jié)合智能算法的人員狀態(tài)識(shí)別
通過(guò)行為范式實(shí)驗(yàn)的狀態(tài)誘發(fā)、或主觀問(wèn)卷、量表評(píng)價(jià)結(jié)果,建立帶標(biāo)簽的多通道客觀定量化數(shù)據(jù),結(jié)合機(jī)器學(xué)習(xí)算法,進(jìn)行模型的自定義訓(xùn)練,實(shí)現(xiàn)人員情緒、認(rèn)知、應(yīng)激、負(fù)荷等狀態(tài)的智能識(shí)別。

四、定制開發(fā)與聯(lián)合實(shí)驗(yàn)
津發(fā)科技具有完備的軟硬件研發(fā)團(tuán)隊(duì),支持聯(lián)合訂制開發(fā),可與高校、科研院所等進(jìn)行產(chǎn)學(xué)研合作,實(shí)現(xiàn)理論與算法結(jié)合轉(zhuǎn)化科技成果。公司同時(shí)具備專業(yè)的科研實(shí)驗(yàn)團(tuán)隊(duì),團(tuán)隊(duì)人員均具有專業(yè)研究背景,搭建產(chǎn)學(xué)研合作與資源共享實(shí)驗(yàn)平臺(tái),提供實(shí)驗(yàn)設(shè)計(jì)-數(shù)據(jù)采集-數(shù)據(jù)處理-統(tǒng)計(jì)分析全流程的聯(lián)合科研與實(shí)驗(yàn)服務(wù)。
五、廠家介紹
北京津發(fā)科技股份有限公司是高新技術(shù)企業(yè)、科技部認(rèn)定的科技型中小企業(yè)和中關(guān)村高新技術(shù)企業(yè),具備自主進(jìn)出口經(jīng)營(yíng)權(quán);自主研發(fā)的人因工程與工效學(xué)相關(guān)技術(shù)、產(chǎn)品與服務(wù)榮獲多項(xiàng)省部級(jí)科學(xué)技術(shù)獎(jiǎng)勵(lì)、軟件著作權(quán)和省部級(jí)新技術(shù)新產(chǎn)品(服務(wù))認(rèn)證;通過(guò)了歐洲CE、美國(guó)FCC、歐盟RoHS、ISO9001、ISO14001、OHSAS18001等多項(xiàng)國(guó)際認(rèn)證和防爆認(rèn)證。
津發(fā)科技設(shè)立人因工程專業(yè)的學(xué)術(shù)科研團(tuán)隊(duì)、技術(shù)團(tuán)隊(duì)及研發(fā)團(tuán)隊(duì),并通過(guò)多年與科研機(jī)構(gòu)及高校的產(chǎn)學(xué)研合作,積累了人因與工效學(xué)領(lǐng)域多項(xiàng)核心技術(shù),以及基于機(jī)器學(xué)習(xí)等人工智能算法的狀態(tài)識(shí)別和人機(jī)工效評(píng)價(jià)技術(shù)與研究方法等!津發(fā)科技的實(shí)驗(yàn)室規(guī)劃建設(shè)技術(shù)團(tuán)隊(duì)提供技術(shù)支持及售后服務(wù),從實(shí)驗(yàn)室建設(shè)的規(guī)劃與布局,到設(shè)備的培訓(xùn)與指導(dǎo),多角度的進(jìn)行實(shí)驗(yàn)室建設(shè)的全生命周期的服務(wù)。


 采購(gòu)中心
采購(gòu)中心
 化工儀器網(wǎng)
化工儀器網(wǎng)