1范圍
本標準規(guī)定了各類電站閥門用電動執(zhí)行機構(以下簡稱電動執(zhí)行機構),包括功率控制部分的術語、型式、技術要求、選型、試驗方法、檢驗規(guī)則、標志、包裝運輸和貯存等的技術要求。
本標準適用于以電動機驅動的不同型式的關斷閥門、調(diào)節(jié)閥門及擋板等的電動執(zhí)行機構。
2規(guī)范性引用文件
下列文件中的條款通過本標準的引用而成為本標準的條款。凡是注日期的引用文件,其隨后所有的修改單(不包括勘誤的內(nèi)容)或修訂版均不適用于本標準,然而,鼓勵根據(jù)本標準達成協(xié)議的各方研究是否可使用這些文件的版本。凡是不注日期的引用文件,其版本適用于本標準。
GB 755旋轉電機定額和性能
GB/T 997電機結構及安裝型式代號
GB/T 3797電控設備第二部分:裝有電子器件的電控設備
GB 4208外殼防護等級(IP代碼)
GB/T 12222多回轉閥門驅動裝置的連接
GB/T 12223部分回轉閥門驅動裝置的連接
GB/T 13306標牌
JB/T 8218執(zhí)行器術語
JB/T 10308.3測量和控制數(shù)字數(shù)據(jù)通信工業(yè)控制系統(tǒng)用現(xiàn)場總線
3術語和定義
下列術語和定義適用于本標準;本標準采用的其他術語和定義參見JB/T 8218。
3.1
額定轉矩normal torque
轉矩設計給定值。
3.2
控制轉矩tripping torque
在開、關兩個方向,轉矩控制機構所能控制的轉矩范圍值,又稱為切斷轉矩。
控制轉矩有zui大控制轉矩和zui小控制轉矩之分。zui大控制轉矩即為轉矩控制機構所能控制的zui大轉zui小控制轉矩即為轉矩控制機構所能控制的zui小轉矩。
3.3
堵轉轉矩locked torque
電動機轉子被堵住時電動執(zhí)行機構輸出的轉矩。
3.4
設置轉矩setting torque
根據(jù)用戶的要求,出廠前調(diào)整的電動執(zhí)行機構控制轉矩值
3.5
輸出轉速outputspeed
設計給定值為電動執(zhí)行機構輸出軸的轉動速度。
3.6
全行程時間rated travel time
為電動執(zhí)行機構從“全關”位置運行至 “全開”位置或從“0%”行程運行至,“100%”行程所需時間。
3.7
基本誤差intrinsic error
在規(guī)定的參比條件下,實際的行程特性曲線與規(guī)定的行程特性曲線之間的zui大差值,以額定行程的百分數(shù)表示。
3.8
回差hysteresis plus dead band
在額定行程范圍內(nèi),同一輸入信號上升和下降的兩個相應行程值間的zui大差值,以額定行程的百分數(shù)表示。
3.9
死區(qū)dead band
輸入信號正反方向變化不致引起行程有任何變化的有限區(qū)間,以信號值范圍的百分數(shù)表示。
3.10
功率控制部分power control component
一種將輸入電信號轉換放大,以控制電動機啟動、停止和旋轉方向的電氣裝置。
3.11
比例式電動執(zhí)行機構proportional electric actuator
輸出的位移與輸入信號成比例關系,配有功率控制部分的電動執(zhí)行機構。
3.12
積分式電動執(zhí)行機構integral electric actuator
輸出的位移與輸入信號成積分關系,配有功率控制部分的電動執(zhí)行機構。
3.13
智能型電動執(zhí)行機構inligent electric actuator
配有功率控制部分、微處理器及可加裝數(shù)字通信接口,具有閉環(huán)控制功能,并能夠進行故障診斷的電動執(zhí)行機構。
4分類及型式
4.1按電動執(zhí)行機構輸出位移的型式分
a)多回轉電動執(zhí)行機構(直行程執(zhí)行機構);
b)部分回轉電動執(zhí)行機構。
4.2按工作制式分
a)開關型電動執(zhí)行機構。
工作制式為S2工作制,時間定額為10,15,30min。
b)調(diào)節(jié)型電動執(zhí)行機構。
工作制式為S4或S5工作制,負載持續(xù)率10%~80%,工作次數(shù)按電動機功率分為1200,900,600次/h爪或更高。
4.3配有功率控制部分時按控制方式分
a)積分式電動執(zhí)行機構;
b)比例式電動執(zhí)行機構。
5技術要求
5.1電動執(zhí)行機構的構成
a)電動機;
b)減速傳動機構;
c)轉矩控制(機械式或電子式);
d)行程控制(機械式或電子式);
e)位置指示(機械式或電子式);
f)位置信號反饋(用戶要求時提供);
g)手動操作機構:
h)手一電動切換;
i)功率控制(用戶要求時提供)。
5.2電動執(zhí)行機構通用技術要求
5.2.1電動執(zhí)行機構應符合本標準,并按照經(jīng)規(guī)定程序批準的產(chǎn)品圖樣及技術文件制造。
5.2.2電動執(zhí)行機構應在下列條件下正常工作:
a)環(huán)境條件。
1)海拔應不高于1000m;
2)工作環(huán)境溫度:
開關型電動執(zhí)行機構-0℃~+80℃
調(diào)節(jié)型電動執(zhí)行機構-20℃~+60℃
3)工作環(huán)境相對濕度不大于90%(25℃);
4)工作環(huán)境不含有強腐蝕性、易燃、易爆的介質(zhì)。
b)電源條件。
1)電壓額定值:
三相380×(1±10%)V
單相220×(1±10%)V
2)頻率值50×(1±1%)Hz。
c)特殊條件。
特殊電源條件和特殊環(huán)境條件中使用的電動執(zhí)行機構可另行規(guī)定。
5.2.3電動執(zhí)行機構與閥門的連接型式和尺寸應符合GB 12222和GB 12223的規(guī)定。用戶有特殊要求時,可按合同約定的要求執(zhí)行。
5.2.4電動執(zhí)行機構配用的電動機應能滿足電動執(zhí)行機構的各項性能要求。
5.2.5電動執(zhí)行機構外表面應平整、光滑,不得有裂紋、毛刺及磕碰等影響外觀質(zhì)量的缺陷,表面涂漆層應附著牢固、平整、光滑、色澤均勻,無油污、壓痕和其他機械損傷。
5.2.6電動執(zhí)行機構接線部分應有接地螺釘及標志。
5.2.7電動執(zhí)行機構手動操作機構應有開關方向指示,宜為面向手輪順時針為“關”,逆時針為“開”。
5.2.8電動執(zhí)行機構的~般電氣技術要求應符合GB/T 997,GB 755和GB/T 3797要求,電動執(zhí)行機構的電氣接線應符合接線圖的要求,布線光滑平整,固定牢固,導線不得開裂,絕緣層不得損傷。電動執(zhí)行機構的動力電源和控制信號的進線應分開。
5.2.9電動執(zhí)行機構各裸露帶電回路之間,以及帶電零部件與導電零部件或接地零部件之間(不包括印刷電路板)的電氣間隙和爬電距離應符合表1的規(guī)定。
5.2.10電動執(zhí)行機構配置現(xiàn)場位置指示機構時,該指示機構指針的指向應與輸出軸的開關旋向一致,并且運行中無停頓、滯后現(xiàn)象,旋轉角度范圍應為80o-280o。
5.2.11電動執(zhí)行機構配置位置發(fā)送器時,所供電源電壓應為直流12V~30V,其輸出位置信號應為(4-20)mADC,與電動執(zhí)行機構zui終輸出實際位移的誤差應不大于輸出位置信號示值范圍的11%。
5.2.12電動執(zhí)行機構在空載下的噪聲,用聲級計計量應不大于聲壓級75dB(A)。
5.2.13電動執(zhí)行機構所有載流部分與外殼間的絕緣電阻應不低于20MΩ。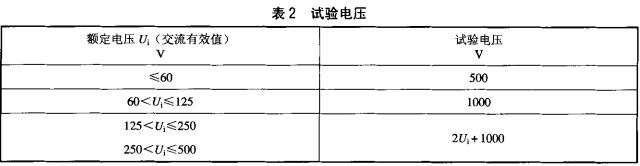
5.2.14電動執(zhí)行機構應能承受頻率為50Hz,電壓為表2規(guī)定的正弦交流電,歷時1min的介電試驗,在試驗過程中不應發(fā)生絕緣擊穿、表面閃絡、泄漏電流明顯增大或電壓突然下降等現(xiàn)象。
5.2.15手一電動切換機構應靈活可靠,電動時手輪不得轉動(摩擦力帶動除外)。
5.2.16電動執(zhí)行機構的zui大控制轉矩應不小于額定轉矩。zui小控制轉矩應不大于額定轉矩,同時應不大于zui大控制轉矩的50%。
5.2.17設置轉矩應不大于zui大控制轉矩,不小于zui小控制轉矩。若用戶未提出轉矩要求,則設置轉矩應為zui小控制轉矩。
5.2.18電動執(zhí)行機構的堵轉轉矩應大于zui大控制轉矩的1.1倍。
5.2.19電動執(zhí)行機構的轉矩控制部分應靈敏可靠,并能調(diào)整輸出控制轉矩的大小,控制轉矩的重復精度應符合表3的規(guī)定。
5.2.20電動執(zhí)行機構的行程控制機構應靈敏可靠,控制輸出軸的位置重復偏差應符合表4的規(guī)定,并應有調(diào)整“開”和“關”位置的標志。
5.2.21電動執(zhí)行機構瞬時承受表5中所規(guī)定的負載時,所有承載零件不應有變形損壞現(xiàn)象。
5.2.22開關型電動執(zhí)行機構應能承受*1萬次連續(xù)運行工作的壽命試驗,調(diào)節(jié)型電動執(zhí)行機構應能承受*20萬次連續(xù)運行工作的壽命試驗。
5.3配有功率控制部分的電動執(zhí)行機構技術要求
5.3.1配有功率控制部分的電動執(zhí)行機構應包括比例式和積分式電動執(zhí)行機構。
5.3.2配有功率控制部分的電動執(zhí)行機構應符合5.2中的各項技術要求。
5.3.3電動執(zhí)行機構的基本誤差應不大于±1.0%。
5.3.4電動執(zhí)行機構的回差應不大于1.0%。
5.3.5比例式電動執(zhí)行機構的死區(qū)應不大于輸入指令信號量程的1%。
5.3.6比例式電動執(zhí)行機構的阻尼特性應不大于3次半周期。
5.3.7電動執(zhí)行機構應能承受頻率為(10~150)Hz,振幅為0.15mm,持續(xù)30min的振動試驗,輸出位置信號變化應不大于位置信號示值的±1%。電動執(zhí)行機構零件不損壞,不松動。
5.3.8電動執(zhí)行機構在經(jīng)48h*運行后,其基本誤差、回差、死區(qū)及阻尼特性均應符合5.3.2~5.3.5的要求。
6選型
6.1電動執(zhí)行機構的功能要求
6.1.1在本標準5.2.2所規(guī)定的工作條件下,電動執(zhí)行機構的性能應符合本標準第5部分的規(guī)定 6.1.2電動執(zhí)行機構的防護等級:戶內(nèi)應不低于IP55(不帶機械制動)和IP54(帶機械制動),戶外應不低于IP65。
6.1.3對電動執(zhí)行機構實施手動操作時,在達到電動執(zhí)行機構zui大控制轉矩情況下,作用于手輪上的操作轉矩應不小于15Nm,手輪(柄)的結構應能承受附加杠桿的驅動。
6.1.4開關型電動執(zhí)行機構應具備以下功能:
a)輸出表示全開、全關及至少一個中間位置的狀態(tài)信號;
b)在負載超出zui大控制轉矩時,輸出開、關行程方向的轉矩過載的狀態(tài)信號;
C)輸出表示運動狀態(tài)的遠傳閃光信號:
d)輸出表示閥門位置的電阻信號或(4~20)mADC電流信號。
6.1.5調(diào)節(jié)型電動執(zhí)行機構應具備以下功能:
a)輸出表示全開、全關位置的狀態(tài)信號:
b)在負載超出zui大控制轉矩時,輸出開、關行程方向的轉矩過載的狀態(tài)信號;
c)輸出表示閥門位置的(4~20)rnADC電流信號,其負載能力應不小于650Ω;
d)電動機應配置熱保護元件。
6.1.6配有功率控制部分的電動執(zhí)行機構應具備以下功能:
a)調(diào)節(jié)型電動執(zhí)行機構應能接受下列型式的輸入信號:
1)(4~20)mADC模擬量信號,輸入阻抗不大于250Ω;
2)24VDC脈沖量信號,脈沖寬度大于300ms;
3)觸點信號。
b)開關型電動執(zhí)行機構應能接受下列型式的輸入信號:
1)觸點信號;
2)24VDC開關量信號。
c)實現(xiàn)遠方和就地操作控制及遠方和就地之間的切換。
d)就地操作控制部分須有防護措施,以防止誤操作。
e)輸入電源的過電流保護。
f)在電源中斷時應保持不動。
g)在控制信號中斷時應保持不動或回到安全位置。
6.1.7智能型電動執(zhí)行機構應具備以下功能:
a)配有功率控制部分的電動執(zhí)行機構的所有功能;
b)通過顯示各種符號、數(shù)字、文字的人機界面進行參數(shù)設置、調(diào)試和故障診斷:
c)通過死區(qū)自適應或其他方式,在各種運行工況下均不發(fā)生振蕩;
d)防止電動機惰走;
e)對輸入的三相電源自動進行相序糾正;
f)發(fā)生故障時應停止在原位置,并給出故障狀態(tài)信號;
g)緊急操作閥門關閉和開啟的功能:
h)具有現(xiàn)場總線的通信接口,并符合JB/T 10308.3的要求。
6.2電動執(zhí)行機構與閥門的配套
6.2.1電動執(zhí)行機構與閥門配套時,其控制轉矩應滿足下列條件:
a)電動執(zhí)行機構輸出的zui大控制轉矩應大于閥門在工作狀態(tài)時開啟或關閉所需的轉矩:
b)電動執(zhí)行機構輸出的zui小控制轉矩應小于閥門在工作狀態(tài)時開啟或關閉所需的轉矩;
c)調(diào)節(jié)型電動執(zhí)行機構輸出的zui小控制轉矩應不小于調(diào)節(jié)閥或調(diào)節(jié)擋板中間位置的運行轉矩。
6.2.2電動執(zhí)行機構與閥門配套時,其額定行程應滿足下列條件:
a)電動執(zhí)行機構的額定行程應不小于閥門的zui大行程;
b)電動執(zhí)行機構的額定行程范圍值應可調(diào)整。
6.2.3雙速運行的閥門應配套下列形式的雙速電動執(zhí)行機構:
a)雙電動機電動執(zhí)行機構:
b)變極雙速電動機電動執(zhí)行機構;
c)變頻調(diào)速電動執(zhí)行機構。
7試驗方法
7.1通用技術要求試驗部分
7.1.1試驗電源均為額定電壓和額定頻率。
7.1.2外殼防護性能試驗按GB 4208的規(guī)定進行,結果應符合6.1.2的規(guī)定。
7.1.7噪聲檢查按GB/T 3797的規(guī)定進行,其結果應符合5.2.12的規(guī)定。
7.1.8絕緣電阻檢查,斷開電動執(zhí)行機構電源,將端子或插件上相應觸點短接,用500V直流電壓的絕緣電阻表測量端子或插件與電動執(zhí)行機構外殼間的絕緣電阻,其阻值應符合5.2.13的規(guī)定。
7.1.9介電檢查,斷開電動執(zhí)行機構電源,將端子或插件上各相應觸點分別短接,然后將5.2.14規(guī)定的電壓與頻率加在端子或插件與電動執(zhí)行機構外殼之間。試驗時,電壓應從零緩慢地上升到規(guī)定值,并保持lmin,其結果應符合5.2.14的規(guī)定擴然后將試驗電壓緩慢地下降到零,斷開試驗電源。抽查檢驗的時間為1s.
7.1.10手一電動切換檢查,有空載切換檢查和加載切換檢查。
a)空載切換檢查,將電動執(zhí)行機構從電動切換到手動狀態(tài),轉動手輪使輸出軸順時針、逆時針方向轉動不小于一圈,啟動電動執(zhí)行機構使輸出軸正、反向轉動不少于一圈。各重復三次,均應符合5.2.15的規(guī)定。
b)加載切換檢查,將電動執(zhí)行機構安裝在試驗臺上,分別調(diào)整開、關方向的控制轉矩至zui小控制轉矩,啟動電動執(zhí)行機構并逐漸加載,直至轉矩控制機構動作,停止后不卸載,重復a)的試驗,也應符合5.2.15的規(guī)定。
7.1.11控制轉矩試驗,將電動執(zhí)行機構安裝在試驗臺上,做下列試驗:
a)zui大控制轉矩試驗。將轉矩控制機構在開、關方向分別調(diào)至zui大控制轉矩,啟動電動執(zhí)行機構并逐漸加載,直至轉矩控制機構動作,此時的輸出轉矩值應符合5.2.16的規(guī)定,開、關方向各測量三次。
b)設置轉矩試驗。將轉矩控制機構在開、關方向分別調(diào)至設置轉矩,啟動電動執(zhí)行機構并逐漸加載,直至轉矩控制機構動作,此時的輸出轉矩值應符合5.2.17的規(guī)定,開、關方向各測量三次。
C)zui小控制轉矩試驗。將轉矩控制機構在開、關方向分別調(diào)至zui小控制轉矩,啟動電動執(zhí)行機構,并逐漸加載,直至轉矩控制機構動作,此時的輸出轉矩值應符合5.2.16的規(guī)定,開、關方向各測量三次。
7.1.12堵轉轉矩試驗,將電動執(zhí)行機構安裝在試驗臺上,使轉矩控制機構不起作用,電動執(zhí)行機構啟動后并逐漸加載,直至電動機停止轉動為止,此時的輸出轉矩應符合5.2.18的規(guī)定。
7.1.13控制轉矩的重復偏差試驗。
a)將電動執(zhí)行機構安裝在試驗臺上,將轉矩控制機構在開、關方向分別調(diào)至zui大控制轉矩,在開、關方向分別空載啟動電動執(zhí)行機構,逐漸加載直至轉矩控制機構動作,測量輸出轉矩值。
b)開、關方向各測量三次,三次測量的平均值為轉矩控制機構的整定基準值,所測得的zui大值為zui大實測值,并按式(2)計算控制轉矩的重復精度: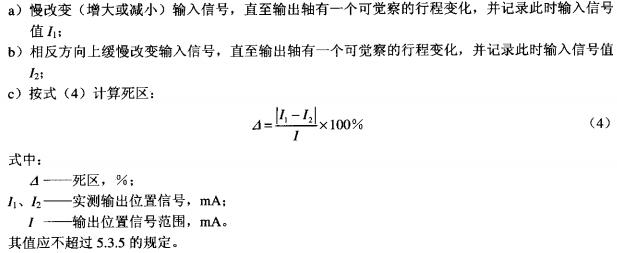
7.1.14行程控制輸出軸角度的重復偏差試驗。
a)將電動執(zhí)行機構安裝在試驗臺上,把行程控制機構的開、關調(diào)至兩個動作位置(相當于閥門“全開”和“全關”位置)。
b)啟動電動執(zhí)行機構,加載至zui小控制轉矩,由行程控制機構使電動執(zhí)行機構分別停止在“全開刃和“全關”位置,以此位置作為基準。
c)啟動電動執(zhí)行機構,載荷不變,全開、全關分別運行三次,每次停止位置與基準位置偏差均應符合5.2.20的規(guī)定。
7.1.15強度試驗,將電動執(zhí)行機構安裝在試驗臺上,做下列試驗:
a)電動執(zhí)行機構僅承受轉矩情況下,使轉矩機構不起作用,用大功率電動機或手輪使電動執(zhí)行機構輸出表5規(guī)定的轉矩值,持續(xù)時間不少于0.5s后立即卸載,解體檢查電動執(zhí)行機構所有承載零件應符合5.2.21的規(guī)定。
b)電動執(zhí)行機構同時承受轉矩和推力情況下,使輸出軸軸線方向承受表5所規(guī)定的推力值。持續(xù)時間不少于0.5s后立即卸載,解體檢查電動執(zhí)行機構所有承載零件應符合5.2.21規(guī)定。
7.1.16壽命試驗,電動執(zhí)行機構壽命試驗按附錄A或附錄B的規(guī)定進行,其結果應符合5.2.22的規(guī)定。
7.2配有功率控制部分的電動執(zhí)行機構的試驗
7.2.1試驗規(guī)定
a)試驗時被測產(chǎn)品處于正常安裝位置:
b)試驗時輸入信號增大時的行程方向為開行程,輸入信號減小時的行程方向為關行程;
c)除非另有規(guī)定,試驗測量點應為電動執(zhí)行機構全行程的0%,25%,50%.75%,100%五個點。
7.22基本誤差試驗
a)比例式電動執(zhí)行機構的基本誤差,將輸入信號緩慢增大或減小,并在開、關行程方向記錄輸入信號值和輸出軸的行程值,按式(3)計算基本誤差:
b)積分式電動執(zhí)行機構的基本誤差,以手動方式操作電動執(zhí)行機構,使位置發(fā)送器信號緩慢增大或減小,并在開、關行程方向記錄位置信號和輸出軸的行程值,同樣按式(3)計算基本誤差。
每個測量點上每次測量值的基本誤差均應不超過5.3.3的規(guī)定。
7.2.3回差試驗
電動執(zhí)行機構的回差由7.2.2中所測得的各測量點的開、關行程方向基本誤差之間zui大代數(shù)差的值來確定。其值應不超過5.3.4的規(guī)定。
7.2.4死區(qū)試驗
比例式電動執(zhí)行機構的死區(qū)應在額定行程25%,50%,75%三點上按下列步驟測量:
7.2.5阻尼特性試驗
對比例式電動執(zhí)行機構分別輸入量程的25%,50%,75%的階躍信號,觀察輸出軸在開、關兩個行程方向上擺動的半周期次數(shù)。擺動的半周期次數(shù)應符合5.3.6的規(guī)定。
7.2.6振動試驗
將電動執(zhí)行機構安裝在振動試驗臺上,以10Hz-150Hz的頻率分別在三個相互垂直方向上進行掃頻振動,尋找共振點,然后在其共振頻率上分別進行30min的耐振試驗。如果無共振點,則在150Hz頻率進行30min的耐振試驗,試驗中測量輸出位置信號,其變化量應符合本標準5.3.6的規(guī)定。試驗后,檢查執(zhí)行機構,應符合5.3.7的規(guī)定。
7.2.7穩(wěn)定性試驗
使電動執(zhí)行機構在額定行程的50%附近,以接通持續(xù)率為20%-50%,每小時接通次數(shù)為(580±50)次運行48h,試驗后重新測量7.2.2-7.2.5規(guī)定的性能,應符合5.3.8的規(guī)定。
8檢驗規(guī)則
8.1出廠檢驗
每臺電動執(zhí)行機構均應進行出廠檢驗,檢驗項目和技術要求按表6的規(guī)定,全部出廠檢驗項目檢驗合格后由質(zhì)檢部門簽發(fā)產(chǎn)品合格證明書。
8.2抽查檢驗
8.2.1抽查檢驗應從生產(chǎn)廠質(zhì)檢部門檢查合格的電動執(zhí)行機構中隨機抽樣,抽樣數(shù)一般不應少于批量的3%。
8.2.2抽查檢驗的項目和技術要求按表6的規(guī)定,如有一臺不合格應加倍抽檢,對不合格的項目進行重新檢驗,如仍不合格,應逐臺檢驗。
8.3型式試驗
對產(chǎn)品進行全面的性能和質(zhì)量檢驗,驗證該產(chǎn)品是否符合本標準的要求。進行型式試驗的產(chǎn)品必須是經(jīng)過出廠檢驗合格后的產(chǎn)品。
8.3.1有下列情況之一者,應進行型式試驗:
a)試制新的電動執(zhí)行機構;
b)電動執(zhí)行機構的設計、工藝材料等方面有重大改變,可能影響產(chǎn)品性能時:
c)電動執(zhí)行機構正常生產(chǎn)時,每5年進行一次;
d)停產(chǎn)5年以上的電動執(zhí)行機構恢復生產(chǎn)時。
8.3.2型式試驗的項目和技術要求按本標準表6的規(guī)定。
8.3.3對于同結構、同材料、同工藝的產(chǎn)品,允許只作典型規(guī)格的型式試驗。
8.3.4型式試驗應從經(jīng)出廠檢驗合格的產(chǎn)品中隨機抽取,按表6規(guī)定項目進行檢驗,如有某一項目不合格,則應按抽樣數(shù)加倍抽取,對不合格的項目進行復檢,如該項目仍不合格,則型式檢驗為不合格。
9標志、包裝運輸及貯存
9.1標志
9.1.1電動執(zhí)行機構外殼上應有產(chǎn)品標牌,并標注下列內(nèi)容:
a)制造廠名稱;
b)產(chǎn)品名稱、型號;
c)zui大控制轉矩;
d)zui小控制轉矩;
e)設置轉矩;
f)輸出轉速(或全行程時間);
g)行程/轉圈數(shù);
h)防護等級:
i)出廠編號;
1)出廠日期。
9.1.2標牌應符合GB/T 13306的有關要求。
9.2包裝
9.2.1電動執(zhí)行機構外露加工表面應涂防銹油。
9.2.2電動執(zhí)行機構包裝箱應裝箱發(fā)運,并應在箱中固定。包裝箱應防雨、牢固。包裝好后的同等規(guī)格電動執(zhí)行機構的包裝箱,當五箱疊放在一起時應不得損壞。包裝箱外表面應有不易擦掉的標志,其內(nèi)容為:
a)制造廠名稱;
b)產(chǎn)品名稱、型號;
c)收貨單位名稱、地址;
d)“向上”、“輕放”等文字或符號:
e)毛重和體積(長×寬×高)。
9.2.3電動執(zhí)行機構出廠時包裝箱內(nèi)應附有產(chǎn)品合格證、產(chǎn)品使用說明書和裝箱單,并應用防潮紙或塑料薄膜包妥。
9.2.4產(chǎn)品裝箱單應包括下列內(nèi)容,并加蓋檢驗人員印章:
a)制造廠名稱、地址:
b)產(chǎn)品名稱、型號;
c)產(chǎn)品編號;
d)所附文件的名稱和數(shù)量;
e)裝箱數(shù)量;
f)裝箱日期。
9.3運輸和貯存
9.3.1電動執(zhí)行機構在運輸過程中應避免劇烈碰撞。
9.3.2產(chǎn)品應存放在溫度為-20℃~+45℃,相對濕度不大于85%的通風、干燥、無腐蝕性介質(zhì)的倉庫內(nèi)。
以上內(nèi)容為轉載,來源:閥門網(wǎng)







 12
12
立即詢價
您提交后,專屬客服將第一時間為您服務