 化工儀器網
化工儀器網
公司動態
FESTO再度創新水下通過超聲波實現無碰撞游動
閱讀:1166 發布時間:2018-7-3FESTO再度創新水下通過超聲波實現無碰撞游動?
通過超聲波,海豚和*鯨即使在昏暗和漆黑的水域中也可以借助自身的回音定位功能來辨別自己的位置。潛艇也使用超聲波技術來定位。超聲波傳感器可以計算距離,甚至可以計算距離透明材料的距離,即使在水下也不成問題。BionicFinWave的設計利用了這些屬性:得益于超聲波傳感器,費斯托的水下機器人可在由丙烯酸玻璃制成的管道系統中實現無碰撞游動
超聲波傳感器向其目標物體的方向傳播高頻范圍內的聲波,聲波再從目標物體處往回反射。傳感器接收這些信號后,可通過計算回聲傳回的時間計算出距離。通過這種測量原理,可以測量距離并確定自己的位置。
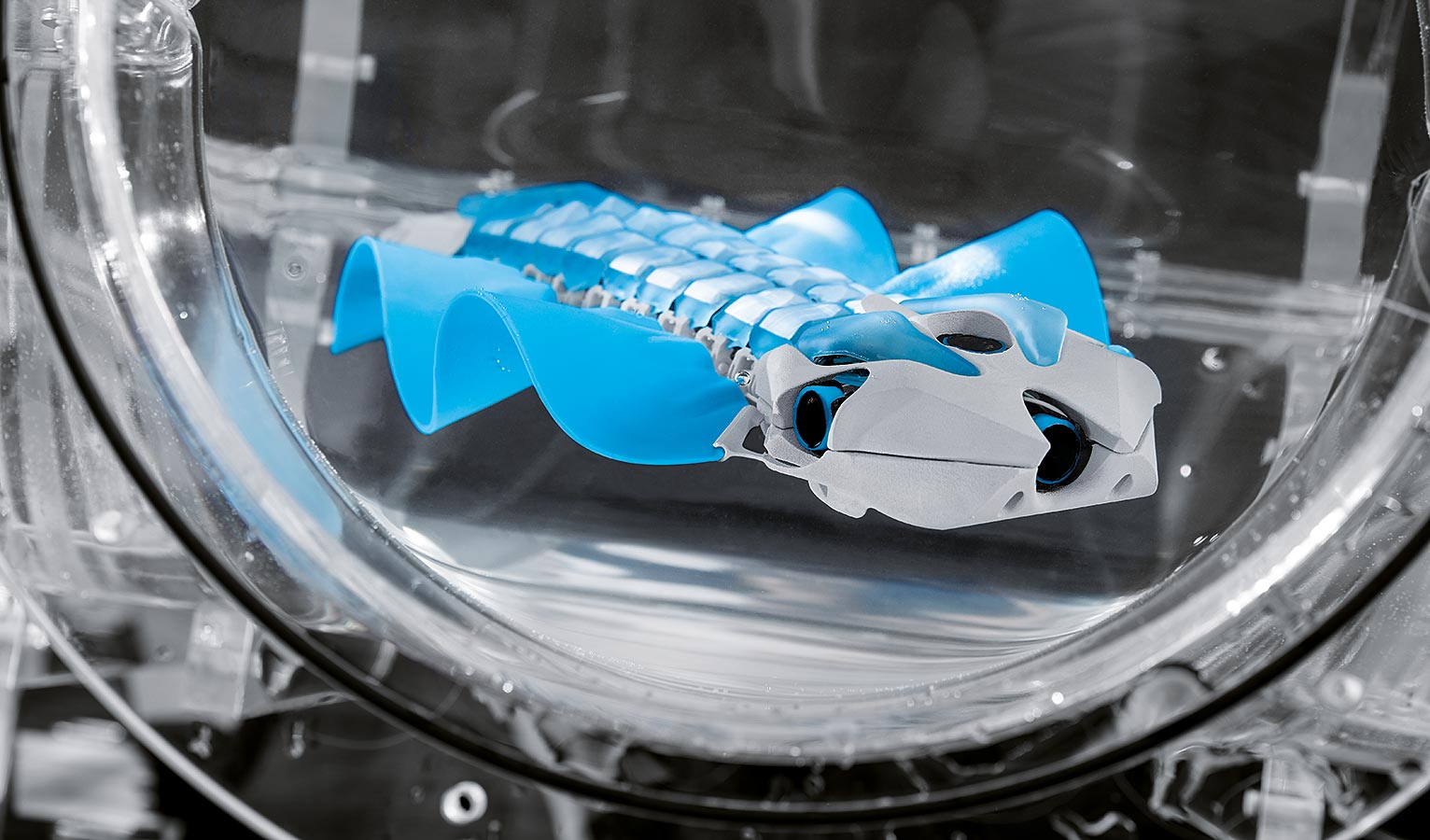
費斯托公司的水下機器人BionicFinWave采用了該技術,借助其鰭片的起伏運動,能夠在透明管道系統中實現無碰撞游動。其頭頂的五個超聲波傳感器和慣性傳感器可持續測量到墻壁的距離及其當前在水中的方向。當到達管道系統轉彎處時,處理器會評估這些數據并由此計算出結果,同時控制鰭片,使BionicFinWave盡可能居中游動,而不會撞擊到墻壁。
起伏的鰭片運動
BionicFinWave使用兩個側鰭游動。由此產生了一個連續波浪,即所謂的起伏鰭片運動。野生的海渦蟲、烏賊和裸臀魚都以這種方式在海中移動。隨著鰭片的起伏運動,魚將水推向身后,由此產生向前的推力。
靈活的硅膠鰭片
BionicFinWaves的鰭片*由硅膠制成,沒有支柱或其他支撐元件。因此,其柔韌度*,可以真實地再現自然樣板的流暢波浪運動。它們分別在左右兩側固定在九個小型杠桿臂上,其偏轉角度為45°。杠桿臂由位于水下機器人機體上的兩個伺服電機驅動。兩個相鄰的曲軸將動力傳遞至杠桿,使兩個鰭片能夠單獨移動。這使他們能夠產生不同的波形。
比如,要進行游動轉彎,外部鰭片的移動速度要快于內部鰭片,與挖掘機的鏈條同理。BionicFinWave頭部的第三個伺服電機控制機體的彎曲,使其能夠上下浮動。曲軸和接頭在3D打印過程中制成一體,因此具有相應的柔性和靈活性。
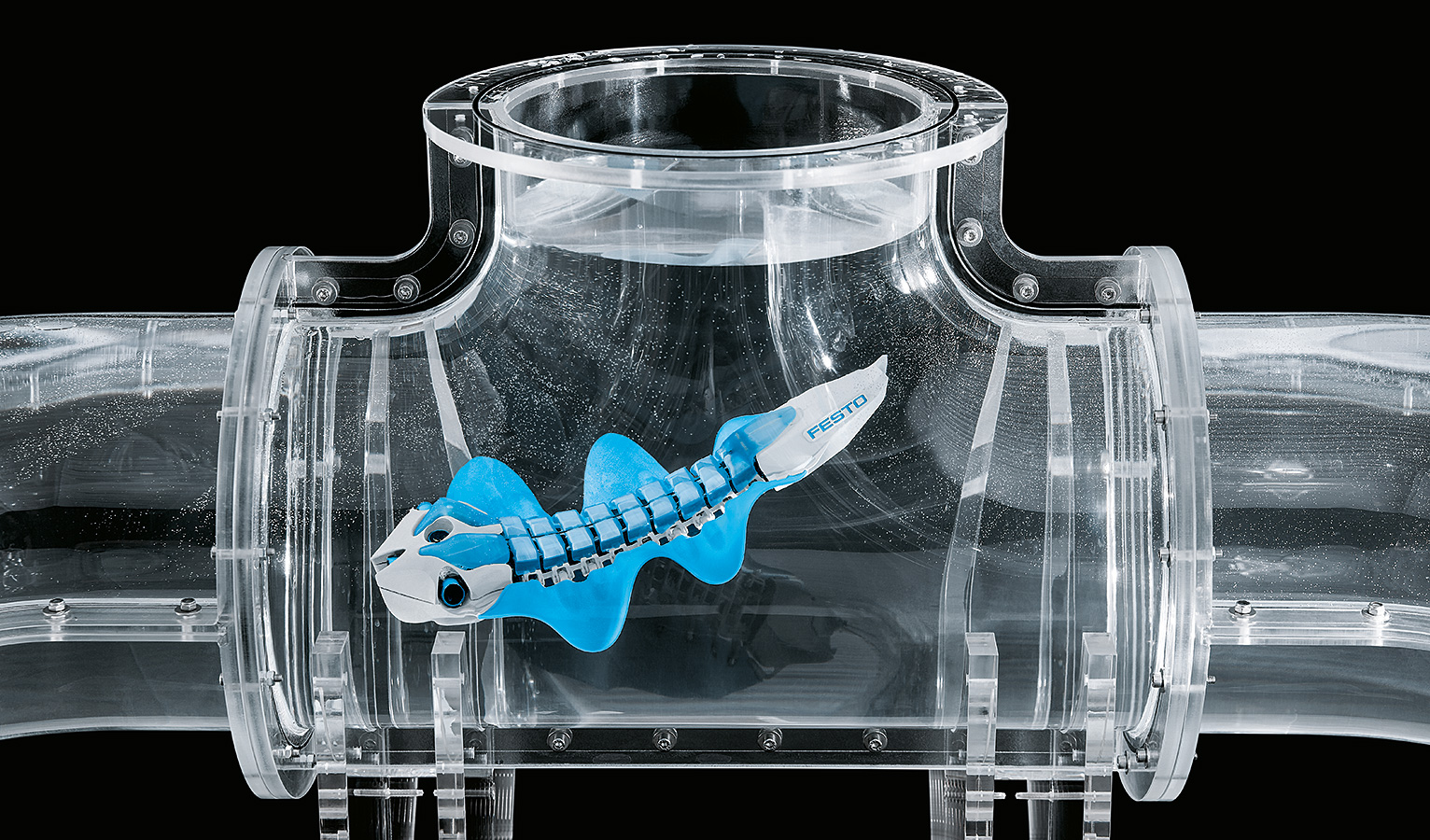 得益于超聲波傳感器,費斯托的BionicFinWave可在管道系統中實現無碰撞游動。
得益于超聲波傳感器,費斯托的BionicFinWave可在管道系統中實現無碰撞游動。