西門子MM420變頻器 西門子MM420變頻器
潯之漫 智控技術(shù)有限公司 上海詩慕自動化設(shè)備有限公司
本公司銷售西門子自動化產(chǎn)品,*,質(zhì)量保證,價格優(yōu)勢
西門子PLC,西門子觸摸屏,西門子數(shù)控系統(tǒng),西門子軟啟動,西門子以太網(wǎng)
西門子電機(jī),西門子變頻器,西門子直流調(diào)速器,西門子電線電纜
我公司大量現(xiàn)貨供應(yīng),價格優(yōu)勢,*,德國*
西門子數(shù)控伺服系統(tǒng)802C S、802D SL、810D DE、820D SL、840C CE、840D DE、840D SL、840Di SL、S120數(shù)控系統(tǒng)、數(shù)控伺服驅(qū)動模塊、控制模塊、電源模塊、備品備件等。本店產(chǎn)品質(zhì)量按西門子原廠質(zhì)量標(biāo)準(zhǔn)。
昆山后創(chuàng)機(jī)電設(shè)備有限公司本著“以人為本、科技先導(dǎo)、顧客滿意、持續(xù)改進(jìn)”的工作方針,致力于工業(yè)自動化控制領(lǐng)域的產(chǎn)品開發(fā)、工程配套和系統(tǒng)集成,擁有豐富的自動化產(chǎn)品的應(yīng)用和實踐經(jīng)驗以及雄厚的技術(shù)力量,尤其以 PLC復(fù)雜控制系統(tǒng)、傳動技術(shù)應(yīng)用、伺服控制系統(tǒng)、數(shù)控備品備件、人機(jī)界面及網(wǎng)絡(luò)/軟件應(yīng)用為公司的技術(shù)特長,幾年來,昆山后創(chuàng)公司在與德國 SIEMENS公司自動化與驅(qū)動部門的長期緊密合作過中,建立良好的相互協(xié)作關(guān)系。 主要優(yōu)勢產(chǎn)品西門子:S7-200CN、S7-200、Smart200、S7-300、S7-400、S7-1200、觸摸屏、DP電纜、DP接頭、6FC、6SN、S120、V10、V20、V60、V80、G110、G120、6RA、伺服數(shù)控備件、NCU、MM系列變頻器。

肖特基二極管是以金屬和半導(dǎo)體接觸形成的勢壘為基礎(chǔ)的二極管,簡稱肖特基二極管(Schottky Barrier Diode),具有正向壓降低(0.4--0.5V)、反向恢復(fù)時間很短(10-40納秒),而且反向漏電流較大,耐壓低,一般低于150V,(信息來源:)多用于低電壓場合。
這兩種管子通常用于開關(guān)電源。
肖特基二極管和快恢復(fù)二極管區(qū)別:前者的恢復(fù)時間比后者小一百倍左右,前者的反向恢復(fù)時間大約為幾納秒~!
前者的優(yōu)點還有低功耗,大電流,超高速~!電氣特性當(dāng)然都是二極管阿~!
快恢復(fù)二極管在制造工藝上采用摻金,單純的擴(kuò)散等工藝,可獲得較高的開關(guān)速度,同時也能得到較高的耐壓.目前快恢復(fù)二極管主要應(yīng)用在逆變電源中做整流元件.
肖特基二極管: 反向耐壓值較低40V-50V,通態(tài)壓降0.3-0.6V,小于10nS的反向恢復(fù)時間。它是具有肖特基特性的“金屬半導(dǎo)體結(jié)”的二極管。其正向起始電壓較低。其金屬層除材料外,還可以采用金、鉬、鎳、鈦等材料。其半導(dǎo)體材料采用硅或砷化鎵,多為N型半導(dǎo)體。這種器件是由多數(shù)載流子導(dǎo)電的,所以,其反向飽和電流較以少數(shù)載流子導(dǎo)電的PN結(jié)大得多。由于肖特基二極管中少數(shù)載流子的存貯效應(yīng)甚微,所以其頻率響僅為RC時間常數(shù)限制,因而,它是高頻和快速開關(guān)的理想器件。其工作頻率可達(dá)100GHz。并且,MIS(金屬-絕緣體-半導(dǎo)體)肖特基二極管可以用來制作太陽能電池或發(fā)光二極管。
快恢復(fù)二極管:有0.8-1.1V的正向?qū)▔航担?5-85nS的反向恢復(fù)時間,在導(dǎo)通和截止之間迅速轉(zhuǎn)換,提高了器件的使用頻率并改善了波形。快恢復(fù)二極管在制造工藝上采用摻金,單純的擴(kuò)散等工藝,可獲得較高的開關(guān)速度,同時也能得到較高的耐壓.目前快恢復(fù)二極管主要應(yīng)用在逆變電源中做整流元件.
四、變頻器用——電解電容在電路中的作用

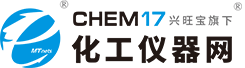
EM253位控模塊,速度與精度的*協(xié)調(diào)使用簡單、控制精確
EM 253的控制范圍從微型步進(jìn)電機(jī)到智能伺服驅(qū)動器。
運(yùn)行快速而不受約束
適應(yīng)性強(qiáng)
低震蕩
控制靈活,功能強(qiáng)大
簡便的軟件配置,圖形化的、集成于STEP 7-Micro/WIN,V 3.2(及以上版本)的向?qū)Ь哂幸韵鹿δ?
三、定位模塊EM253技術(shù)規(guī)范
1、通用規(guī)范
| 型號 | 6ES7 253-1AA22-0XA0 |
| 模塊結(jié)構(gòu) | S7-200 擴(kuò)展模板 |
| EM輸入點 | 5 |
| EM輸出點 | 8 |
| 尺寸(W×H×D) | 71.2×80×62 mm |
| 重量 | 約190g |
| 外部供電電壓 | 11至30VDC |
| 功率消耗 | 2.5W |
| 電流消耗 | 5VDC供電:190mA 24VDC供電:見下文 |
| 組態(tài)軟件 | STEP 7-Micro/WIN,V 3.2(及以上版本) |
2、輸入特性
| 輸入數(shù)量 | 5點 |
| 輸入類型 | 匯點/源點(IEC 類型1匯點,不包括ZP) |
輸入電壓 允許LMT+、LMT-
• ZP 電涌(所有輸入) 額定值 • STP、RPS、LMT+、LMT- • ZP | |
| | 5VDC,供模塊使用善脈沖信號的質(zhì)量和抗擾性。 |
2、運(yùn)行5VDC以上的漏極開路輸出,將使射頻輻射超過允許的限制。可能需要對系統(tǒng)或布線采取射頻輻射防護(hù)措施。
四、定位模塊EM253與S-200 PLC的兼容性
定位模塊EM253可以與各種不同類型的S7-200 CPU(222、224、226 和226XM)相連接:
CPU | 說明 |
| CPU 222版本1.10或更高版本 | CPU 222 DC/DC/DC和CPU 222 AC/DC/繼電器 |
| CPU 224版本1.10或更高版本 | CPU 224 DC/DC/DC和CPU 224 AC/DC/繼電器 |
| CPU 226版本1.10或更高版本 | CPU 226 DC/DC/DC和CPU 226 AC/DC/繼電器 |
| CPU 226XM版本1.10或更高版本 | CPU 226XM DC/DC/DC和CPU 226XM AC/DC/繼電器 |
五、定位模塊EM253模塊LED狀態(tài)表

本地I/O | LED | 顏色 | 功能說明 |
| - | MF | 紅色 | 當(dāng)模塊檢測到嚴(yán)重錯誤時照亮。 |
| - | MG | 綠色 | 當(dāng)沒有任何模塊故障時照亮,檢測到配置錯誤時以1赫茲的頻率閃爍 |
| - | PWR | 綠色 | 當(dāng)模塊L+和M端子加上24 VDC電源時照亮 |
| 輸入 | STP | 綠色 | 當(dāng)“停止”輸入打開時照亮 |
| 輸入 | RPS | 綠色 | 當(dāng)參考點開關(guān)輸入打開時照亮 |
| 輸入 | ZP | 綠色 | 當(dāng)零脈沖輸入打開時照亮 |
| 輸入 | LMT- | 綠色 | 當(dāng)負(fù)限制輸入打開時照亮 |
| 輸入 | LMT+ | 綠色 | 當(dāng)正限制輸入打開時照亮 |
| 輸出 | P0 | 綠色 | 當(dāng)P0輸出發(fā)出脈沖時照亮 |
| 輸出 | P1 | 綠色 | 當(dāng)P1輸出發(fā)出脈沖時或當(dāng)該輸出指示正向運(yùn)動時照亮 |
| 輸出 | DIS | 綠色 | 當(dāng)DIS輸出激活時照亮 |
| 輸出 | CLR | 綠色 | 當(dāng)清除漂移計數(shù)器輸出激活時照亮 |
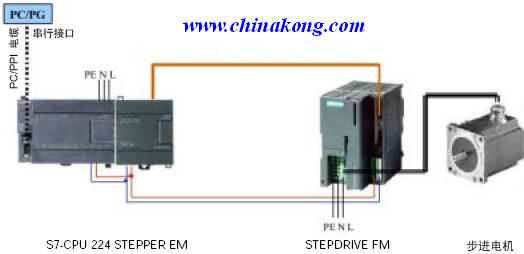
六、定位模塊EM253模塊各種接線圖
1、EM 253位控模塊輸入和輸出的內(nèi)部示意圖

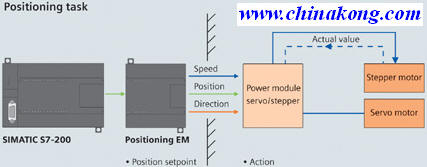
2、EM 253位控模塊與SIMATIC FM步進(jìn)驅(qū)動的連接

3、EM 253位控模塊與工業(yè)設(shè)備公司(下一個步進(jìn))的連接

4、 EM 253位控模塊與定向馬達(dá)UPK標(biāo)準(zhǔn)的連接

5、EM 253位控模塊與Parker/Compumotor OEM 750的連接

七、定位模塊EM253模塊組態(tài)系統(tǒng)簡單范例
(1) 接地保護(hù)導(dǎo)線(PE)必須采用黃綠雙色線;
(2) 三相電源U, V, W分別采用黃、綠、紅三色;
(3) 交流控制電路采用紅色;
(4) 直流控制電路采用藍(lán)色。
3.導(dǎo)線的絕緣和耐壓要符合電路要求;進(jìn)行控制板內(nèi)部布線,要求走線橫平豎直、整齊、合理,接點不得松動;進(jìn)行控制板外部布線,對于可移動的導(dǎo)線應(yīng)放適當(dāng)?shù)挠嗔浚菇^緣套管(或金屬軟管)在運(yùn)動時不承受拉力。
4.安裝時按鈕的相對位置及選擇的顏色
(1)“停止”按鈕應(yīng)置于“啟動”按鈕的下方或左側(cè),當(dāng)用兩個“啟動”按鈕
控制相反方向時,“停止”按鈕可裝在中間。
(2)“停止”和“急停”用紅色,“啟動”用綠色。
5.安裝指示燈的顏色
紅—危險或報警
黃—警告
綠—安全
白—電源開關(guān)接通
@
PLC系統(tǒng)的模擬量變動很大且不穩(wěn)定時的故障原因
PLC系統(tǒng)的模擬量是一個變動很大的不穩(wěn)定的值,可能是如下原因:
你可能使用了一個自供電或隔離的傳感器電源,兩個電源沒有彼此連接,即模擬量輸入模塊的電源地和傳感器的信號地沒有連接。這將會產(chǎn)生一個很高的上下振動的共模電壓,影響模擬量輸入值。
另一個原因可能是模擬量輸入模塊接線太長或絕緣不好。
可以用如下方法解決:
1) 連接傳感器輸入的負(fù)端與模塊上的公共M 端以補(bǔ)償此種波動。(但要注意確保這是兩個電源系統(tǒng)之間系。)
背景是:
模擬量輸入模塊內(nèi)部是不隔離的;
共模電壓不應(yīng)大于 12V;
對于60Hz干擾信號的共模抑制比為40dB。
2)使用模擬量輸入濾波器。
梯形圖編程語言是一種圖形語言 ,下表是兩種梯形圖的繼電器符號圖對照。
下面兩個圖分別是繼電器控制和PLC梯形圖控制的對比。
@
熔斷器和熱繼電器在電氣線路中的使用
在電動機(jī)控制接線中,主電路中裝有熔斷器,為什么還要加裝熱繼電器?它們各起何作用,能否互相代替?而在電熱及照明線路中,為什么只裝熔斷器而不裝熱繼電器?
答:熔斷器在電氣線路中主要起短路保護(hù)和嚴(yán)重過載保護(hù)作用,而熱繼電器主要用于過載保護(hù).兩者不能互為代用,但可以互為補(bǔ)充.如果用熔斷器作電動機(jī)的過載保護(hù),為了防止電動機(jī)在啟動過程中熔斷器熔斷,熔斷器熔體的額定電流一般應(yīng)取電動機(jī)額定電流的2. 5~3倍,這樣即使電動機(jī)長時間過負(fù)荷50%,熔斷器也不會熔斷,而電動機(jī)可能因長時間過負(fù)荷而燒壞.所以不能用熔斷器作過負(fù)載保護(hù).而熱繼電器是利用電流的熱效應(yīng)來工作的,由于熱慣性的影響,盡管發(fā)生短路時電流很大,也不可能使熱繼電器立即動作,這樣就延長了短路故障的影響時間,對供電系統(tǒng)及用電設(shè)備會造成危害.所以也不能用熱繼電器作為短路保護(hù).
對于電熱及照明設(shè)備,由于負(fù)載的性質(zhì)不同于電動機(jī)的拖動負(fù)載,一般來說,它們不會出現(xiàn)過負(fù)載現(xiàn)象,所以,一般不裝備熱繼電器,而只裝備熔斷器,主要起短路保護(hù)作用.
異步電動機(jī)接觸器聯(lián)鎖正反轉(zhuǎn)控制線路有何優(yōu)缺點?應(yīng)如何改進(jìn)?并畫出控制線路。
答:三相異步電動機(jī)接觸器聯(lián)鎖的正反轉(zhuǎn)控制的優(yōu)點是工作安全可靠,缺點是操作不便。因電動機(jī)從正轉(zhuǎn)變?yōu)榉崔D(zhuǎn)時,必須先按下停止按鈕后,才能按反轉(zhuǎn)啟動按鈕,否則由于接觸器的聯(lián)鎖作用,不能實現(xiàn)反轉(zhuǎn)。為克服此線路的不足,可采用按鈕聯(lián)鎖或按鈕和接觸器雙重聯(lián)鎖的正反轉(zhuǎn)控制線路。
1,濾波作用,在電源電路中,整流電路將交流變成脈動的直流,而在整流電路之后接入一個較大容量的電解電容,利用其充放電特性,使整流后的脈動直流電壓變成相對比較穩(wěn)定的直流電壓。在實際中,為了防止電路各部分供電電壓因負(fù)載變化而產(chǎn)生變化,所以在電源的輸出端及負(fù)載的電源輸入端一般接有數(shù)十至數(shù)百微法的電解電容.由于大容量的電解電容一般具有一定的電感,對高頻及脈沖干擾信號不能有效地濾除,故在其兩端并聯(lián)了一只容量為0.001--0.lpF的電容,以濾除高頻及脈沖干擾.
2,耦合作用:在低頻信號的傳遞與放大過程中,為防止前后兩級電路的靜態(tài)工作點相互影響,常采用電容藕合.為了防止信號中韻低頻分量損失過大,一般總采用容量較大的電解電容。
二、電解電容的判斷方法
電解電容常見的故障有,容量減少,容量消失、擊穿短路及漏電,其中容量變化是因電解電容在使用或放置過程中其內(nèi)部的電解液逐漸干涸引起,而擊穿與漏電一般為所加的電壓過高或本身質(zhì)量不佳引起。判斷電源電容的好壞一般采用萬用表的電阻檔進(jìn)行測量.具體方法為:將電容兩管腳短路進(jìn)行放電,用萬用表的黑表筆接電解電容的正極。紅表筆接負(fù)極(對指針式萬用表,用數(shù)字式萬用表測量時表筆互調(diào)),正常時表
圖5-39 選擇序列的梯形圖三
2.并行序列的編程
(1)使用STL指令的編程
如圖5-40所示為包含并行序列的功能表圖,由S31、S32和S34、S35組成的兩個序列是并行工作的,設(shè)計梯形圖時應(yīng)保證這兩個序列同時開始和同時結(jié)束,即兩個序列的步S31和S34應(yīng)同時變?yōu)榛顒硬剑瑑蓚€序列的后一步S32和S35應(yīng)同時變?yōu)椴换顒硬健2⑿行蛄械姆种У奶幚硎呛芎唵蔚模?dāng)步S0是活動步,并且轉(zhuǎn)換條件X0=1,步S31和S34同時變?yōu)榛顒硬剑瑑蓚€序列開始同時工作。當(dāng)兩個前級步S32和S35均為活動步且轉(zhuǎn)換條件滿足,將實現(xiàn)并行序列的合并,即轉(zhuǎn)換的后續(xù)步S33變?yōu)榛顒硬剑D(zhuǎn)換的前級步S32和S35同時變?yōu)椴换顒硬健?/p>
@
是對圖5-40功能表圖采用STL指令編寫的梯形圖。對于并行序列的分支,當(dāng)S0的STL觸點和X0的常開觸點均接通時,S31和S34被同時置位,系統(tǒng)程序?qū)⑶凹壊絊0變?yōu)椴换顒硬剑粚τ诓⑿行蛄械暮喜ⅲ肧32、S35的STL觸點和X2的常開觸點組成的串聯(lián)電路使S33置位。在圖5-41中,S32和S35的STL觸點出現(xiàn)了兩次,如果不涉及并行序列的合并,同一狀態(tài)器的STL觸點只能在梯形圖中使用一次,當(dāng)梯形圖中再次使用該狀態(tài)器時,只能使用該狀態(tài)器的一般的常開觸點和LD指令。另外,F(xiàn)X系列PLC規(guī)定串聯(lián)的STL觸點的個數(shù)不能超過8個,換句話說,一個并行序列中的序列數(shù)不能超過8個。
圖5-41 并行序列的梯形圖
(2)使用通用指令的編程
如圖5-42所示的功能表圖包含了跳步、循環(huán)、選擇序列和并行序列等基本環(huán)節(jié)。
圖5-42 復(fù)雜的功能表圖
如圖5-43所示是對圖5-42的功能表圖采用通用指令編寫的梯形圖。步M301之前有一個選擇序列的合并,有兩個前級步M300和M313,M301的起動電路由兩條串聯(lián)支路并聯(lián)而成。M313與M301之間的轉(zhuǎn)換條件為,相應(yīng)的起動電路的邏輯表達(dá)式為,該串聯(lián)支路由M313、X13的常開觸點和C0的常閉觸點串聯(lián)而成,另一條起動電路則由M300和X0的常開觸點串聯(lián)而成。步M301之后有一個并行序列的分支,當(dāng)步M301是活動步,并且滿足轉(zhuǎn)換條件X1,步M302與步M306應(yīng)同時變?yōu)榛顒硬剑@是用M301和Xl的常開觸點組成的串聯(lián)電路分別作為M302和M306的起動電路來實現(xiàn)的,與此同時,步M301應(yīng)變?yōu)椴换顒硬健2組302和M306是同時變?yōu)榛顒硬降模虼酥恍枰獙302的常閉觸點與M301的線圈串聯(lián)就行了。
圖5-43 使用通用指令編寫的梯形圖
步M313之前有一個并行序列的合并,該轉(zhuǎn)換實現(xiàn)的條件是所有的前級步(即步M305和M311)都是活動步和轉(zhuǎn)換條件X12滿足。由此可知,應(yīng)將M305,M311和X12的常開觸點串聯(lián),作為控制M313的起動電路。M313的后續(xù)步為步M314和M301,M313的停止電路由M314和M301的常閉觸點串聯(lián)而成。
編程時應(yīng)該注意以下幾個問題:
1)不允許出現(xiàn)雙線圈現(xiàn)象。
2)當(dāng)M314變?yōu)?ldquo;1”狀態(tài)后,C0被復(fù)位(見圖5-43),其常閉觸點閉合。下一次掃描開始時M313仍為“1”狀態(tài)(因為在梯形圖中M313的控制電路放在M314的上面),使M301的控制電路中上面的一條起動電路接通,M301的線圈被錯誤地接通,出現(xiàn)了M314和M301同時為“1”狀態(tài)的異常情況。為了解決這一問題,將M314的常閉觸點與M301的線圈串聯(lián)。
3)如果在功能表圖中僅有由兩步組成的小閉環(huán),如圖5-44a所示,則相應(yīng)的輔助繼電器的線圈將不能“通電”。例如在M202和X2均為“1”狀態(tài)時,M203的起動電路接通,但是這時與它串聯(lián)的M202的常閉觸點卻是斷開的,因此M203的線圈將不能“通電”。出現(xiàn)上述問題的根本原因是步M202既是步M203的前級步,又是它的后序步。如圖5-44b所示在小閉環(huán)中增設(shè)一步就可以解決這一問題,這一步只起延時作用,延時時間可以取得很短,對系統(tǒng)的運(yùn)行不會有什么影響。
圖5-44 僅有兩步的小閉環(huán)的處理
(3)使用以轉(zhuǎn)換為中心的編程
與選擇序列的編程基本相同,只是要注意并行序列分支與合并處的處理。
(4)使用仿STL指令的編程
如圖5-45所示是對圖5-42功能表圖采用仿STL指令編寫的梯形圖。在編程時用接在左側(cè)母線上與各步對應(yīng)的輔助繼電器的常開觸點,分別驅(qū)動一個并聯(lián)電路塊。這個并聯(lián)電路塊的功能如下:驅(qū)動只在該步為“1”狀態(tài)的負(fù)載的線圈;將該步所有的前級步對應(yīng)的輔助繼電器復(fù)位;指明該步之后的一個轉(zhuǎn)換條件和相應(yīng)的轉(zhuǎn)換目標(biāo)。以M301的常開觸點開始的電路塊為例,當(dāng)M301為“1”狀態(tài)時,僅在該步為“1”狀態(tài)的負(fù)載Y0被驅(qū)動,前級步對應(yīng)的輔助繼電器M300和M313被復(fù)位。當(dāng)該步之后的轉(zhuǎn)換條件X1為“1”狀態(tài)時,后續(xù)步對應(yīng)的M302和M306被置位。
針應(yīng)先向電阻小的方向擺動,然后逐漸返回直至無窮大處。表針的擺動幅度越大或返回的速度越慢,說明電容的容量越大,反之則說明電容的容量越小.如表針指在中間某處不再變化,說明此電容漏電,如電阻指示值很小或為零,則表明此電容已擊穿短路.因萬用表使用的電池電壓一般很低,所以在測量低耐壓的電容時比較準(zhǔn)確,而當(dāng)電容的耐壓較高時,打時盡管測量正常,但加上高壓時則有可能發(fā)生漏電或擊穿現(xiàn)象.
 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)