 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網








| 產地類別 | 進口 | 應用領域 | 化工,石油,地礦,電子,交通 |
|---|
潯之漫智控技術(上海)有限公司 上海詩慕自動化設備有限公司
本公司銷售西門子自動化產品,*,質量保證,價格優勢
西門子PLC,西門子觸摸屏,西門子數控系統,西門子軟啟動,西門子以太網
西門子電機,西門子變頻器,西門子直流調速器,西門子電線電纜
我公司大量現貨供應,價格優勢,*,德國*
 |
| 參考價 | 面議 |
更新時間:2020-09-08 10:24:27瀏覽次數:316
聯系我們時請說明是化工儀器網上看到的信息,謝謝!
 |
 |
 |
 |
|

潯之漫智控技術(上海)有限公司 上海詩慕自動化設備有限公司
本公司銷售西門子自動化產品,*,質量保證,價格優勢
西門子PLC,西門子觸摸屏,西門子數控系統,西門子軟啟動,西門子以太網
西門子電機,西門子變頻器,西門子直流調速器,西門子電線電纜
我公司大量現貨供應,價格優勢,*,德國*
配件等訂貨號查詢

一,進線電抗器
1,6SL3203-0CE13-2AA0 額定功率0.55-1.1KW
2,6SL3203-0CE21-0AA0 額定功率1.5-4KW
3,6SL3203-0CE21-8AA0 額定功率5.5-7.5KW
4,6SL3203-0CE23-8AA0 額定功率11-18.5KW
二,制動電阻
1,6SL3201-0BE14-3AA0 額定功率0.55-1.5KW
2,6SL3201-0BE21-0AA0 額定功率2.2-4KW
3,6SL3201-0BE21-8AA0 額定功率5.5-7.5KW
4,6SL3201-0BE23-8AA0 額定功率11-18.5KW
三,出線電抗器
1,6SL3202-0AE16-1CA0 額定功率0.55-2.2KW
2,6SL3202-0AE18-8CA0 額定功率3-4KW
3,6SL3202-0AE21-8CA0 額定功率5.5-7.5KW
4,6SL3202-0AE23-8CA0 額定功率11-18.5KW
1、系統組成部分
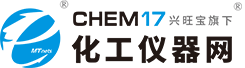
電梯是一種以電動機為動力的垂直升降機,裝有箱狀吊艙,用于多層建筑乘人或載運貨物。曳引繩兩端分別連著轎廂和對重,纏繞在曳引輪和導向輪上,曳引電動機通過減速器變速后帶動曳引輪轉動,靠曳引繩與曳引輪摩擦產生的牽引力,實現轎廂和對重的升降運動,達到運輸目的。
電梯系統組成
曳引系統:曳引系統的主要功能是輸出與傳遞動力,使電梯運行。曳引系統主要由曳引機、曳引鋼絲繩,導向輪,反繩輪組成。
導向系統:導向系統的主要功能是限制轎廂和對重的活動自由度,使轎廂和對重只能沿著導軌作升降運動。導向系統主要由導軌,導靴和導軌架組成。
轎廂:轎廂是運送乘客和貨物的電梯組件,是電梯的工作部分。轎廂由轎廂架和轎廂體組成。
門系統:門系統的主要功能是封住層站入口和轎廂入口。門系統由轎廂門,層門,開門機,門鎖裝置組成。
重量平衡系統:系統的主要功能是相對平衡轎廂重量,在電梯工作中能使轎廂與對重間的重量差保持在限額之內,保證電梯的曳引傳動正常。系統主要由對重和重量補償裝置組成。
電力拖動系統:電力拖動系統的功能是提供動力,實行電梯速度控制。電力拖動系統由曳引電動機,供電系統,速度反饋裝置,電動機調速裝置等組成。
電氣控制系統:電氣控制系統的主要功能是對電梯的運行實行操縱和控制。電氣控制系統主要由操縱裝置,位置顯示裝置,控制屏(柜),平層裝置,選層器等組成。
安全保護系統:保證電梯安全使用,防止一切危及人身安全的事故發生。由電梯限速器、安全鉗、夾繩器、緩沖器、安全觸板、層門門鎖、電梯安全窗、電梯超載限制裝置、限位開關裝置組成。
本文主要介紹電力拖動系統
2、電力拖動系統
電力拖動系統由曳引電動機,供電系統,速度反饋裝置,電動機調速裝置等組成。
曳引系統主要驅動部分曳引機可分為有齒輪曳引機和無齒輪曳引機。
有齒輪曳引機:由電動機、制動器、減速箱、盤車裝置及底座等組成,還有旋轉編碼器、熱保護、制動器閉合確認開關、接線裝置。主要機型為蝸輪蝸桿傳動曳引機。
無齒輪曳引機:由電動機、制動器、盤車裝置及底座等組成,還有旋轉編碼器、熱保護、制動器閉合確認開關、接線裝置。主要機型為永磁同步無齒輪曳引機。

有齒輪傳動曳引機

永磁同步無齒輪曳引機
永磁同步電機驅動的無齒輪曳引機,由于采用無齒輪曳引技術,省卻了傳統的蝸輪蝸桿減速器,使機房噪音大大降低,較有齒輪產品可減小噪音10分貝以上;無需潤滑油,*了油污染,更符合環保要求。永磁同步電動機轉子由高性能永磁體構成,無勵磁電流,大大地提高電動機的運行效能。由于蝸輪蝸桿的機械傳遞效率比較低,所以永磁同步無齒輪驅動系統比蝸輪蝸桿傳動系統具有更高的效率,降低電力耗能。在安全方面,因為其結構簡單、具有剛性直軸制動等特點,在提供全時上下行超速保護功能的同時,可利用永磁同步電動機的反向發電的特點,為電梯系統與乘客提供多層保護。在應用方面,因為永磁同步曳引機外型的小型化及薄型化特點,使電梯配置與建筑物間整合空間的搭配性大大提升,為建筑設計師提供更大的彈性設計空間,同時也間接的改善了人對建筑物空間的使用率與使用質量。現在市場上主流的垂直電梯都使用永磁同步曳引機。
因為上述永磁同步無齒輪曳引機相對于傳統的有齒輪傳動曳引機的優點,近些年來永磁同步無齒輪曳引機在電梯行業推廣很快。目前國內載人電梯中,無齒輪曳引機的使用率已達60%左右,國內目前的客梯年產量為20萬臺,無齒輪曳引機的年銷量達12萬臺,總產值有20億左右。
三、電力拖動系統控制方案及調試
1、 電機參數及配重的選擇
電梯曳引機選用江蘇西德電梯有限公司生產的無齒輪永磁同步電梯曳引機。
主要電機參數:曳引輪直徑 400mm 額定電流 25.7A
額定速度 1.5m/s 額定功率 11.5Kw
額定負載 1150Kg 額定扭矩 765N
額定電壓 380V 懸掛方式 2/1
額定頻率 24Hz 工作制 S5 40%
注:S5工作制 包括電制動的斷續周期工作制:按一系列相同的工作周期運行,每一周期包括一段起動時間、一段恒定負載運行時間、一段快速電制動時間和一段斷能停轉時間。
電梯配重的計算,配重是一種平衡體,其質量應選擇大約跟電梯廂(包括平均塔載的乘客)的質量相等。當起動電動機時,它只需要供給提升多搭載的乘客上升或少搭載的乘客下降的動力。其余的重力由配重來平衡。按照國家標,出現電梯里面坐滿40%-50%額定載荷的人的概率大,這樣較經濟的情況下應該是對重的重量等于轎廂的重量加上它額定載荷40%-50%的重量。減去轎廂重量的有效配重占額定載荷的比例也叫電梯的平衡系數。本樣機中的動平衡系數約為45%,且懸掛方式為2/1,則:
正常運行時的大扭矩M按照超載10%來計算:
M = (1.1-ψ) × QD1g/2r
= (1.1-0.45) × 1150 × 0.4 × 9.8/4
= 732N
式中,曳引比 r=2, Q為轎廂載重量,D1為曳引輪直徑,D1=400mm, ψ為平衡系數,ψ=0.45。
2、 電力拖動系統方案
曳引機驅動系統的要求:
1、驅動永磁同步電機,實現閉環矢量控制。
2、西德電梯永磁同步電機的編碼器為海德漢 ERN 1387,增量式編碼器 SIN/COS (1 Vpp) 。
3、要求變頻器帶Encoder Simulation TTL差分5V 輸出信號,此信號輸出到電梯控制主板監控電梯實際速度。
4、為保證電梯乘坐舒適性,速度環比例積分根據實際速度切換。
5、變頻器脈寬調制頻率需要8KHz,達到降低電機運行噪音的目的。
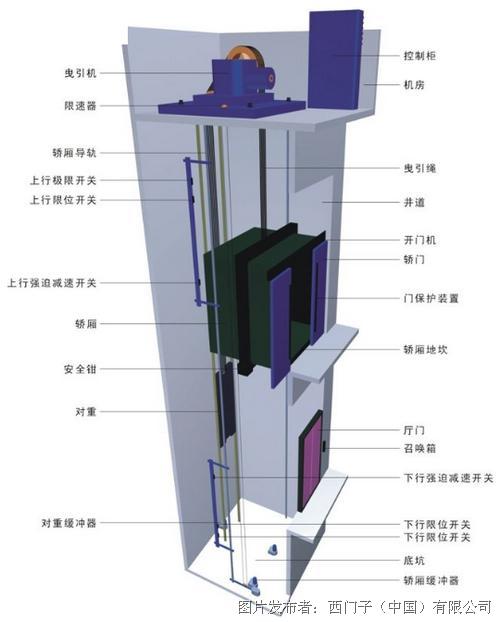
基于西門子S120可以提供以下兩個方案
方案1:S120 CU320-2DP+CUA31+PM340+TM41+SMC20
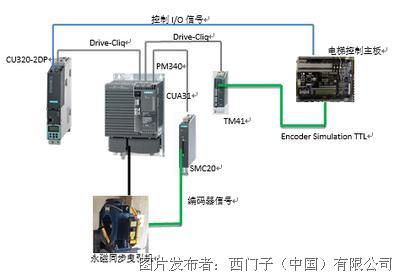
方案2:S120 CU310-2DP+SMC20+PM340+編碼器信號轉換器
方案1中,西門子提供了整個電力拖動系統,S120為了實現變頻器TTL模擬信號的輸出,選擇了TM41選件,且需要選配CU320-2DP做為變頻器的控制單元。相對于方案1,方案2的優點是曳引機驅動變頻器結構簡單,在實現拖動功能的同時,大大節省了曳引同步電機驅動的成本。選用了可靠的第三方編碼器轉換器,變頻器只負責驅動永磁同步電機實現閉環矢量速度控制,TTL差過編碼器信號轉換器直接輸出到電梯控制主板,調試簡單。
3、電力拖動系統選型
因為在電梯提升系統中,用于電梯的永磁無齒同步曳引機根據電梯行業經驗直接提供負載重量和運行線速度。關于變頻器,需要對應同步電機功率的選擇重載功率,客戶通過計算提供了變頻器功率和制動電阻功率。但是為了達到降低電機運行噪音的目,變頻器的脈寬調制頻率需要增加到8KHz,因此需要考慮實際變頻器因脈寬調制頻率增大而造成的輸出電流降容。當變頻器的脈寬調制頻率需要增加到8KHz時,變頻器允許的持續輸出電流降容到額定的70%。
PM340模塊型功率模塊的降額特性曲線
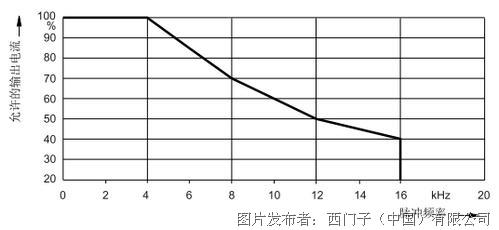
FSA 和 FSE 型:“脈沖頻率-輸出電流”函數圖
客戶主要選擇第三方制動電阻,在S120功率單元PM340有對制動電阻阻值的要求,即客戶選擇的制動單元阻值不能小于PM340功率單元允許的小阻值要求,如果選擇的制動單元阻值小于功率單元允許的阻值,會導致PM340內置的制動單元損壞。
4、第三方永磁同步電機的調試及優化
磁極位置識別:
S120驅動永磁同步電機需要進行磁極位置識別功能來確定同步電機的電氣磁極位置,在磁場定向控制中需要該位置。所以對于帶未校準編碼器的電機,只需要進行一次性磁極位置識別,相比較客戶原先使用施耐德ATV71L, 因為ATV71L不能接入編碼器C, D信號,每次變頻器上電*次運行會自動執行磁極位置識別,從而引起電梯產生較大的震動,降低了電梯的舒適性,而本樣機中S120驅動沈陽藍光永磁同步電機,編碼器為海德漢ERN1387, 帶有C,D信號,所以只需在電梯調試時執行一次磁極位置識別,之后運行不會出現ATV71L的情況,保證了電梯運行的舒適性。
磁極位置識別主要步驟:
1.通過p1980選擇一個識別方法
2.設置p1990=1,啟動一次性磁極位置識別
實際的磁極位置識別過程,電機至少旋轉360゜
實際磁極位置識別方法應滿足以下補充條件:
轉速設定值=0 或靜止狀態
電機能夠自由旋轉,垂直負載脫開
抱閘設置:
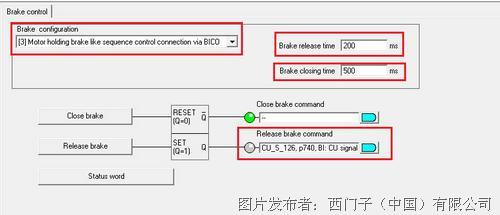
電機抱閘參數設置
P1215=3: 電機抱閘同順序控制,通過 BICO 連接。P1216 電機抱閘打開時間,抱閘通電后(打開抱閘),轉速/ 速度設定值在該時間內保持為零,之后使能轉速/ 速度設定值。P1217 電機抱閘閉合時間, 在執行 OFF1 或 OFF3、給抱閘斷電(閉合抱閘)后,驅動在該時間仍處于閉環控制中,轉速/速度設定值為零,在該時間屆滿后刪除脈沖。如果設置的閉合時間比實際閉合時間短,則可能會使負載滑落;而如果閉合時間設得太大,控制閉環會施加反作用在抱閘上,縮短抱閘使用壽命。
抱閘控制時序
轉矩限制:
轉矩限值是允許的大轉矩,針對電機電動運行和回饋運行設置不同的轉矩限值,且由轉矩限制,電流設置和功率限制共同決定。需要確認設定的回饋功率是否滿足電機回饋運行。
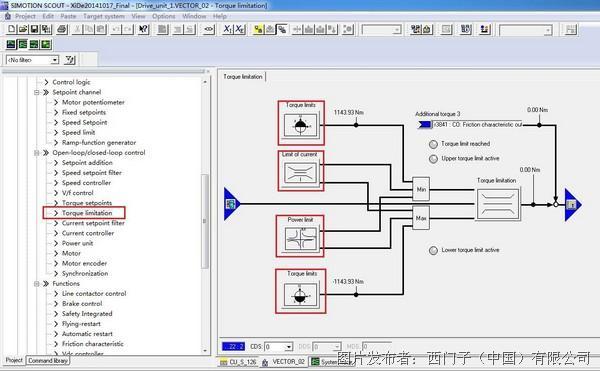
轉矩限制
變頻器控制信號設定:
本樣機中變頻器速度給定值通過二進制選擇的固定頻率給定實現。
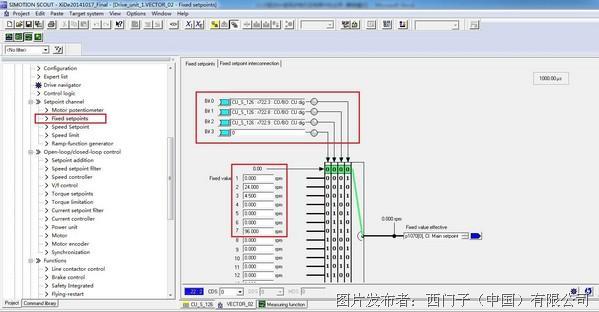
固定頻率給定二進制選擇
變頻器的故障信號輸出信號連接到電梯控制主板,因為在系統上電時,電梯的控制主板啟動時間比變頻器時間要短,當變頻器沒有準備好,電梯控制主板提前啟動變頻器,有可能會導致意外發生,所以需要故障信號輸出信號取反后發送到電梯控制主板。當變頻器控制單元正常運行后才能把故障信號取反發送出去,所以變頻器在正常運行的情況才會發出常1信號,當變頻器斷電或者變頻器故障時,電梯控制主板不能接收到這個常1信號,就認為變頻器不具備啟動條件,整個電梯系統無法正常運行。
電梯運行舒適性設置:
為了滿足乘客乘坐電梯時舒適性的要求,需要通過擴展斜坡函數發生器和轉速控制器適配來實現。
擴展的斜波函數發生器提供電機啟動加速過程中的起始圓弧和結束圓弧,實現了速度的平穩過渡,在電梯整個加減速過程中實現變加速度的功能,在電梯啟動瞬間和快加速到達給定速度時,減小了電梯運行加速度,提高了電梯乘坐的舒適性,避免了電梯從靜止狀態突然啟動和電梯加速到設定速度時的沖擊。
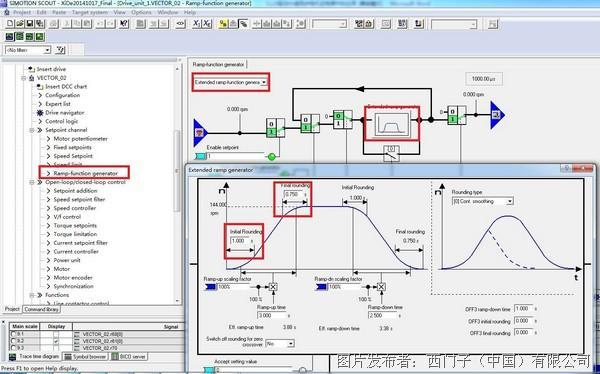
帶初始和結束圓弧的斜波發生器
速度控制器Kp_n/Tn_n適配,首先電梯啟動時,因為電梯是垂直軸,需要較大的Kp_n和較小的Tn_n,當電梯速度變大時,為了保證電梯的舒適性,需要調小電機運行的動態響應,讓速度環特性變軟,即調小Kp_n和增大Tn_n。速度控制器Kp_n/ Tn_n適配實現了根據電梯運行速度切換速度控制器Kp_n/ Tn_n的功能。相對于基于電梯運行速度切換速度控制器KP_n/ Tn_n,S120速度控制器KP_n/ Tn_n適配功能更加靈活,實現了Kp_n/ Tn_n的平滑調整。
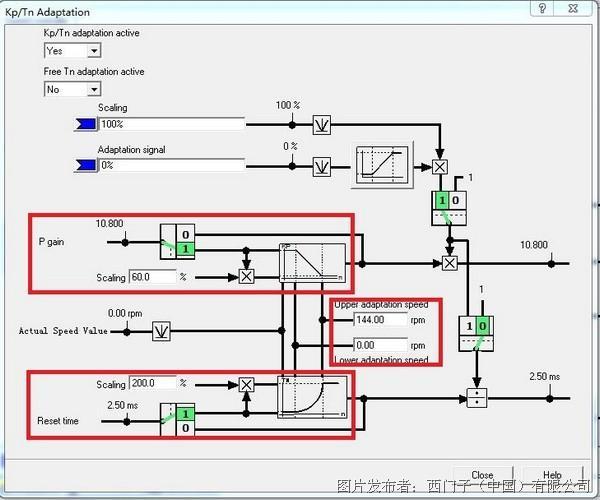
速度控制器Kp_n/ Tn_n適配
電梯提升的優化:
S120驅動曳引同步電機,首先采用 P1910 進行電機數據識別(靜態測量)。空載時進行編碼器識別得到磁極,得到P431換向角偏移,不接入負載,通過P1960選擇2,進行帶編碼器的旋轉檢測得到更準確的飽和特性曲線。在電機沒有更換及編碼器安裝沒有移動的前提下,可以直接在P431中輸入已知的磁極換向角偏移,不需要重新做磁極角辨識。
基于之前的優化準備工作,接入負載,曳引機掛上轎廂和配重,根據之前電梯配重的選擇,在轎廂空置的情況下,曳引機的有效負載約為額定負載的50%,基本達到了電梯運行的大負載,啟動電梯下行,電機運行在電動狀態,出現溜車現象,S120報故障F7412(驅動:換向角出錯)。但在接入負載之前多次進行了磁極位置識別,得到的P431換向角偏移基本相同,且在曳引電機空載時可以正常運行,所以可以排除是因為換向角偏移角度錯誤的原因,根據手冊關于F7412的故障說明中提到可能是控制回路因為參數設定錯誤而不穩定。結合其中溜車時的Trace圖中的速度和扭矩的變化,發現速度環的響應達不到性能要求。通過逐步增大KP_n和減小Tn_n,電梯可以啟動運行。
KP_n, 2.5 Tn_n 60ms

KP_n, 11.5 Tn_n 2.5ms
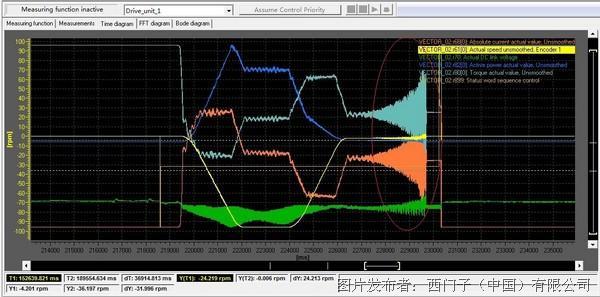
運行過程中,發現電梯運行在檢修模式時,電梯每次停車,都會出現非常大的堵轉電流,基本達到了變頻器的大電流,實際情況也是電梯停車時都會有很大的震動,通過觀察Trace圖的電流曲線和抱閘閉合命令輸出,大電流出現在抱閘閉合命令輸出之前,本樣機中變頻器的抱閘控制命令是先輸出到電梯控制主板,然后由電梯控制主板發出抱閘打開和閉合命令。由Trace圖分析,此堵轉電流出現是因為電腦控制主板發出停車命令,而后通過檢測TTL差分信號得到電機的實際速度后控制抱閘,使抱閘閉合動作先于變頻器的抱閘時序,導致電機堵轉。通過把變頻的抱閘時序和電梯控制主板的抱閘時序進行匹配,消除了此堵轉電流。
西門子G120C電抗器 功率選件,配件等
電梯正常工作時,電機首先到達電梯大速度,電梯控制主板通過樓層距離計算出的速度包絡曲線,當轎廂快到達樓層時,切換到慢速運行使轎廂底部與樓層對齊,完成平層動作。當速度控制器Kp_n, 11.5,Tn_n,3ms,電機運行4.5rpm時出現了速度震蕩。通過Trace圖分析,因為在低速運行時Kp_n偏大,造成電機轉速震蕩,因為電梯啟動時需要電機具有高動態響應能力,所以不能大幅度的減小Kp_n,可以通過慢慢的減小Kp_n,本樣機中當Kp_n減小到10.8時,電機速度在4.5rpm出現的速度震蕩消失,電梯在整個運行周期內,速度平穩。
 Kp_n, 11.5 Tn_n 2.5ms
Kp_n, 11.5 Tn_n 2.5ms
Kp_n, 10.8 Tn_n 2.5ms,電梯上行 電機發電運行

Kp_n, 10.8 Tn_n 2.5ms,電梯下行 電機電動運行
驗收測試及后期優
抱閘力檢測功能:
為了保證電梯曳引機抱閘系統的正常運行,增加了抱閘力檢測功能。
當電梯處于空閑模式時,電梯控制器會輸出抱閘力測試請求,由變頻器負責給電機一定的堵轉力矩,由電梯控制板檢測曳引輪是否出現打滑現象。如果有打滑認為抱閘力不夠,電梯停用,否則認為測試正常。
具體實現方法為:
溜車優化
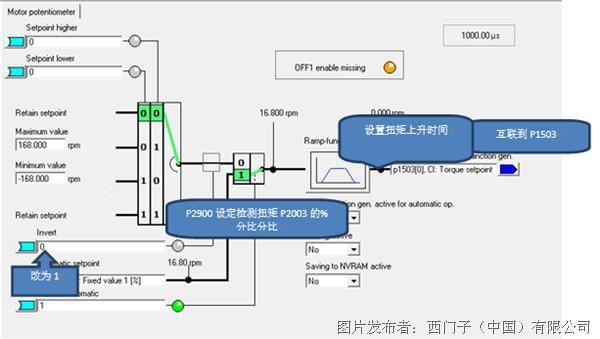
P2900 BICO 互聯到P1042,P2900 設定扭矩的百分比,是P2003的百分比,
P1041 改成1,自動給定
r1050 BICO 互聯到P1503,測試扭矩給定
P1030 改為 2 H,取消上升斜坡的平滑
P1047 設定扭矩上升時間, 0Nm到P2003顯示扭矩的時間
P1501 BICO互聯到 抱閘測試端子
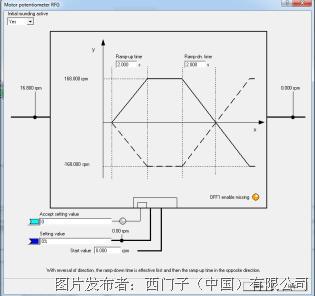
通過簡單的參數設置,利用MOP的斜坡發生器,實現了抱閘力測試的要求。
隱藏式電機停機去電流:
永磁同步電機根據轉子結構一般可分為凸極式(IPMSM)和隱級式(SPMSM)。
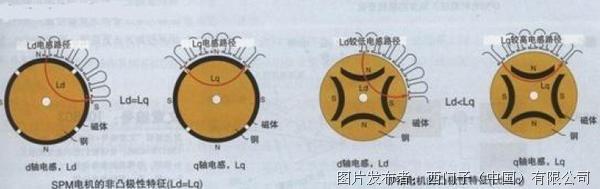
對于IPMSM具有明顯的凸極效應,即直軸電感與交軸電感不相等(一般)Ld < Lq
西門子G120C電抗器 功率選件配件等 西門子G120C電抗器 功率選件配件等
對于SPMSM沒有凸極效應,即Ld = Lq
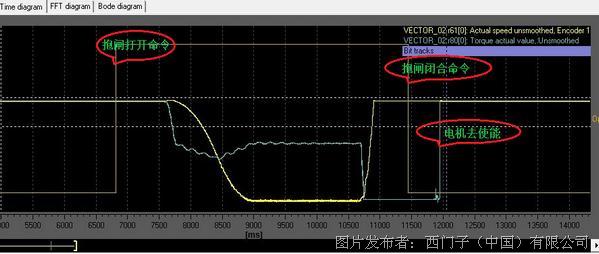
在永磁同步曳引機在電梯主提升的應用過程中,發現隱級式同步電機在停車時會發出有別于抱閘閉合的響聲,影響了電梯乘坐的舒適感。
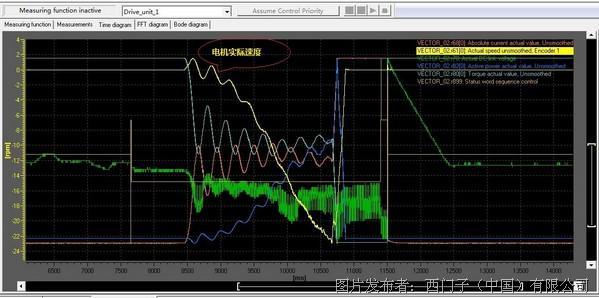
由下圖發現現場監控電電機停車S120去使能瞬,由在電機零速停車時,發現有3rpm的速度震蕩,這個速度震蕩導致了停車噪音的出現。
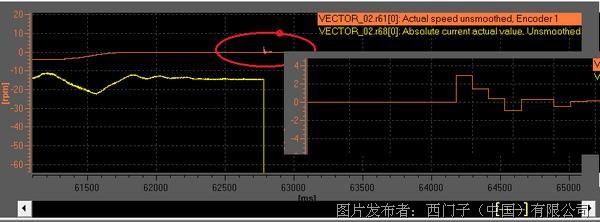
電機零速停車速度曲線
根據永磁同步電機根據轉子結構一般可分為凸極式(IPMSM)和隱級式(SPMSM)的主要不同點是Ld 和 Lq不相等,懷疑是否因為去使能時電流突然變為零,導致了電機的震動。
所以為了驗證電流突變是否震蕩的直接原因,所以了通過DCC編程減緩了電機去使能時的電流突變。
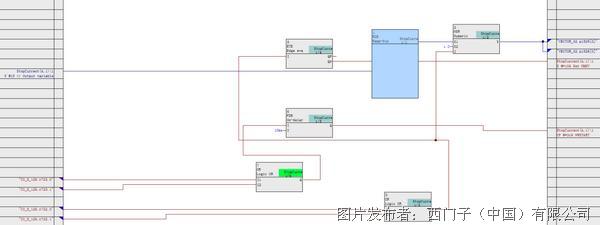
DCC功能圖
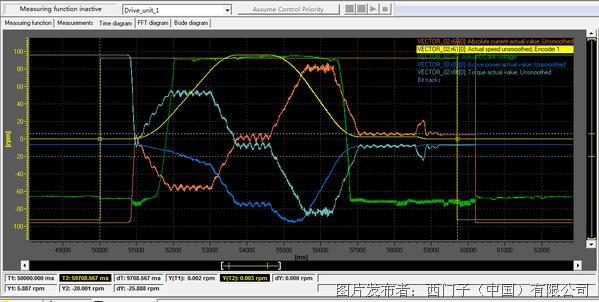
實現的主要原理是在電梯控制主板不發啟動命令給變頻器時,激活DCC斜坡函數。通過扭矩限幅的方式實現電機電流按照斜坡緩慢下降,達到消除電機停車震動的問題。由下圖可以看到,當電流按照斜坡下降時,電機速度沒有出現抖動。
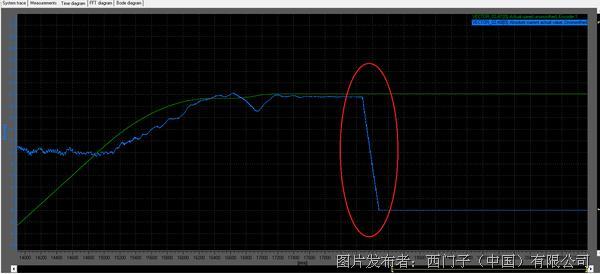
帶去電流功能的零速停車曲線
五、樣機開發結果
此電梯電力拖動系統,從調試結束至今已經穩定運行了一年多,產品性能和電梯乘坐舒適度都得到了客戶的認可。現場實際調試了兩臺電梯永磁同步無齒曳引機,通過簡單的參數設置,以及優化速度環比列Kp_n和積分Tn_n,容易實現客戶要求的性能,DCC和BICO功能,大大提高了系統功能的可擴展性。
六、應用體會
在樣機開發前期,多種控制方案的對比是非常重要的,在滿足控制性能要求的前提下,選擇性價比制方案,提高我們產品的競爭力。
 |