 化工儀器網(wǎng)
化工儀器網(wǎng)









產(chǎn)品簡(jiǎn)介
| 應(yīng)用領(lǐng)域 | 醫(yī)療衛(wèi)生,環(huán)保,化工,生物產(chǎn)業(yè) |
|---|
 |
世聯(lián)博研(北京)科技有限公司 |
|
—— 銷售熱線 ——
18618101725 |
| 參考價(jià) | 面議 |
更新時(shí)間:2022-02-07 14:24:25瀏覽次數(shù):148
聯(lián)系我們時(shí)請(qǐng)說(shuō)明是化工儀器網(wǎng)上看到的信息,謝謝!
| 應(yīng)用領(lǐng)域 | 醫(yī)療衛(wèi)生,環(huán)保,化工,生物產(chǎn)業(yè) |
|---|
美國(guó)motionmonitorTM 一站式動(dòng)作實(shí)時(shí)捕捉與多源數(shù)據(jù)*實(shí)時(shí)同步分析系統(tǒng)
整合能力強(qiáng)、的實(shí)時(shí)3D運(yùn)動(dòng)捕捉分析系統(tǒng),可集成各捕捉分析硬件,數(shù)據(jù)實(shí)時(shí)同步分析,用于涉及復(fù)雜運(yùn)動(dòng)分析的臨床、生物力學(xué)、神經(jīng)控制和運(yùn)動(dòng)醫(yī)學(xué)應(yīng)用。
運(yùn)動(dòng)生物力學(xué)整合升級(jí)服務(wù),三維動(dòng)作多源數(shù)據(jù)采集同步,動(dòng)作捕捉多源數(shù)據(jù)同步采集,整合升級(jí)Bertec 微型稱重傳感器,不同廠家動(dòng)作捕捉數(shù)據(jù)同步,動(dòng)作捕捉肌電腦電整合集成,整合升級(jí)VICONBonita相機(jī),整合升級(jí)InterSense慣性測(cè)量單元,整合升級(jí)AMTI 儀表式樓梯,人體運(yùn)動(dòng)多源數(shù)據(jù)采集同步
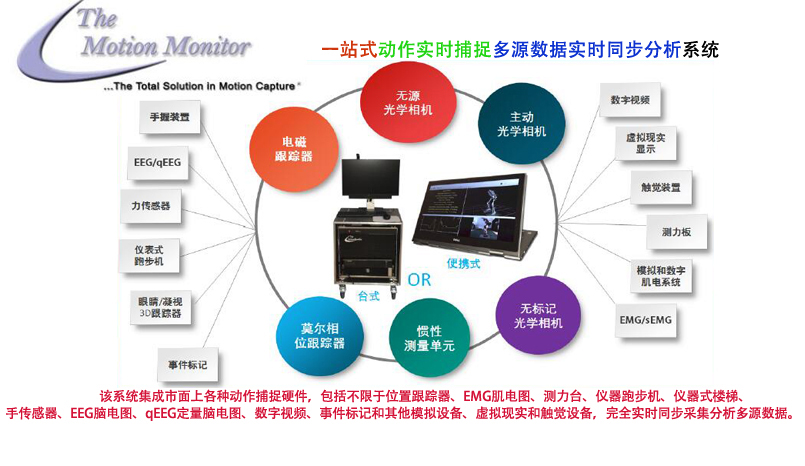
美國(guó)MotionMonitor是套一站式交鑰匙3D運(yùn)動(dòng)捕捉系與分析統(tǒng),旨在集成各種硬件,包括但不限于運(yùn)動(dòng)跟蹤器、EMG()、測(cè)力臺(tái)、儀器式跑步機(jī)、儀器式樓梯、手傳感器、EEG腦電圖、定量腦電圖(quantitative EEG,qEEG)系統(tǒng)、數(shù)字視頻、事件標(biāo)記和其他模擬設(shè)備、虛擬現(xiàn)實(shí)和觸覺(jué)設(shè)備,同時(shí)*實(shí)時(shí)同步采集、分析多源數(shù)據(jù)。
從豐富分析工具集合中生成的數(shù)據(jù)可立即通過(guò)所有數(shù)據(jù)輸出的圖形顯示進(jìn)行回放。令人驚嘆的3D計(jì)算機(jī)渲染對(duì)象動(dòng)畫(huà)可以被視為骨架、簡(jiǎn)筆畫(huà)或人形。集成使用市場(chǎng)上廣泛硬件實(shí)現(xiàn)對(duì)人體運(yùn)動(dòng)、大腦活動(dòng)、眼球運(yùn)動(dòng)、肌肉募集和作用在身體上的外力實(shí)時(shí)測(cè)量。
MotionMonitor可以集成和準(zhǔn)確定位市場(chǎng)上運(yùn)動(dòng)、運(yùn)動(dòng)所有主流廠家硬件,數(shù)據(jù)*同步。確保您選擇的組件協(xié)同工作,并使用的計(jì)算機(jī)渲染和圖形顯示實(shí)時(shí)呈現(xiàn)。數(shù)據(jù)輸出包括關(guān)節(jié)力和力矩,以及從虛擬環(huán)境同步接收的用戶定義變量,以及所有運(yùn)動(dòng)和動(dòng)力學(xué)數(shù)據(jù),包括用自上而下或自下而上的逆動(dòng)力學(xué)模型計(jì)算的聯(lián)合力和矩。為您*的研究需求提供全面、系統(tǒng)化、高質(zhì)量的數(shù)據(jù)。
數(shù)據(jù)可在不需要編程的直觀下拉菜單中使用。用戶可編寫(xiě)腳本定義額外的數(shù)據(jù)和事件,并與統(tǒng)計(jì)模塊一起擴(kuò)展固有功能。
使用該系統(tǒng)您可以集成各種硬件,并實(shí)時(shí)同步動(dòng)作分析所有方面:
·自定義全面解決方案,以確保您實(shí)現(xiàn)研究目標(biāo)......
確定哪種技術(shù)和配置對(duì)于您的*需求是的
·集成市面上任何動(dòng)作捕捉分析硬件,以利用每種技術(shù)的優(yōu)勢(shì),確保性比價(jià)。
·避免處理多個(gè)供應(yīng)商的麻煩,MotionMmonitor支持團(tuán)隊(duì)一鍵式呼叫將解決硬件和軟件相關(guān)問(wèn)題。
·便捷、強(qiáng)大、的分析:
系統(tǒng)內(nèi)置的下拉菜單,一鍵式按鈕進(jìn)行全面、系統(tǒng)化的高質(zhì)量數(shù)據(jù)分析,也可以自定義界面,創(chuàng)建圖標(biāo)驅(qū)動(dòng)接口,便于快速和簡(jiǎn)單的設(shè)置,集合和分析過(guò)程。圖標(biāo)確保以所有運(yùn)算符以一致方式收集數(shù)據(jù),從而減少了過(guò)程中的錯(cuò)誤引入。
該系統(tǒng)是動(dòng)作運(yùn)動(dòng)捕捉分析業(yè)界集成能力強(qiáng)的平臺(tái),包含但不僅限于如下品牌:
- 美國(guó)Ascension的 trakSTAR位置跟蹤器
- Polhemus 的 Fastrak位置跟蹤器
- Polhemus 的Polhemus 的Patriot位置跟蹤器
- Polhemus 的Liberty 位置跟蹤器
- Polhemus 的G4位置跟蹤器
- Motion Analysis Corp的Haw動(dòng)作捕捉相機(jī)
- Motion Analysis Corp的Eagle動(dòng)作捕捉相機(jī)
- Motion Analysis Corp的Osprey 動(dòng)作捕捉相機(jī)
- Motion Analysis Corp的Kestrel 動(dòng)作捕捉相機(jī)
- Qualisys 的 Oqus動(dòng)作捕捉相機(jī)
- Qualisys 的 Miqus相機(jī)
- VICON 的 Vero相機(jī)
- VICON 的 Bonita相機(jī)
- VICON 的 Vantage相機(jī)
- VICON 的 T 系列相機(jī)
- VICON 的 MX 相機(jī)
- Natural Point 的 Optitrak Flex 動(dòng)作捕捉相機(jī)
- Natural Point 的 OPrime 動(dòng)作捕捉相機(jī)
- PhaseSpace 的 Impulse 和 Impulse2動(dòng)作捕捉手套、相機(jī)和捕捉系統(tǒng)
- Phoenix Technologies Incorporated 的 Visualeyez 3D動(dòng)作捕捉系統(tǒng)
- thern Digital 的 Optotrak 3020 和 Certus
- Metria Innovation 的 MPT 莫爾相位跟蹤系統(tǒng)
- Xsens慣性測(cè)量單元
- Delsys慣性測(cè)量單元
- APDM慣性測(cè)量單元
- InterSense慣性測(cè)量單元
- Bertec測(cè)力臺(tái)
- AMTI 測(cè)力臺(tái)
- Kistler 測(cè)力臺(tái)
- Bertec儀表式樓梯
- AMTI 儀表式樓梯
-bertec儀表式跑步機(jī)(提供跑步機(jī)的實(shí)時(shí)動(dòng)態(tài)控制)
-ATI微型稱重傳感器
-AMTI微型稱重傳感器
-Bertec 微型稱重傳感器
為什么選擇該系統(tǒng)?
-集各家之長(zhǎng)為我所用,系統(tǒng)化全面的數(shù)據(jù)及分析、整合
位置定位跟蹤emg eeg集成整合,整合升級(jí)模擬系統(tǒng),整合升級(jí)QualisysOqus動(dòng)作捕捉相機(jī),生物力學(xué)運(yùn)動(dòng)分析數(shù)據(jù)同步采集分析系統(tǒng),動(dòng)作捕捉及力學(xué)評(píng)估系統(tǒng),測(cè)力板肌電腦電整合集成,整合升級(jí)Polhemus G4位置跟蹤器,數(shù)據(jù)融合動(dòng)作捕捉系統(tǒng),整合升級(jí)Delsys 廠家的Trigno EMG,整合升級(jí)Polhemus Liberty 位置跟蹤器
●一套交鑰匙3D動(dòng)作與運(yùn)動(dòng)捕捉、分析系統(tǒng),平臺(tái)旨在分析各種動(dòng)作與運(yùn)動(dòng)的所有方面
●集各家之長(zhǎng)為我所用:支持并提供廣泛市面上幾乎所有動(dòng)作、運(yùn)動(dòng)硬件
●能夠?qū)⒛难芯哭D(zhuǎn)化為您自己的臨床、教學(xué)、人體工程學(xué)或運(yùn)動(dòng)應(yīng)用
●全套、完整的多多尺度的生物力學(xué)研究和康復(fù)軟件
●根據(jù)需求一站式靈活選配,滿足各種運(yùn)動(dòng)與動(dòng)作捕捉、監(jiān)測(cè)、分析
●提供更加全面化、系統(tǒng)化的運(yùn)動(dòng)動(dòng)作捕獲分析數(shù)據(jù)(包括骨骼、肌肉、血管、神經(jīng)以及外部刺激等)
●完整的一站式交鑰匙3D動(dòng)作捕捉分析系統(tǒng):集成所有市面主流動(dòng)作、運(yùn)動(dòng)硬件之長(zhǎng),全面系統(tǒng)化的數(shù)據(jù)深挖、分析、整合。
●支持從廣泛的硬件(所有市面主流動(dòng)作、運(yùn)動(dòng)硬件)進(jìn)行實(shí)時(shí)采集。
●使用測(cè)力臺(tái)、手傳感器、EMG、眼動(dòng)追蹤、視頻、EEG、虛擬現(xiàn)實(shí)、觸覺(jué)和模擬數(shù)據(jù)同步采集運(yùn)動(dòng)數(shù)據(jù),簡(jiǎn)化采集和分析。
●通過(guò)原始或處理數(shù)據(jù)的圖形顯示提供即時(shí)回放。
●無(wú)需編程工作——從設(shè)置到數(shù)據(jù)收集再到分析,操作可以通過(guò)單選按鈕和下拉菜單完成。
●提供跨各種硬件系統(tǒng)的通用軟件平臺(tái),可取各家之長(zhǎng)、更高性價(jià)比。
●廣泛的功能和能力的多樣性,支持各種應(yīng)用程序。
●市場(chǎng)上的數(shù)據(jù)采集、分析和可視化系統(tǒng)可測(cè)量人體運(yùn)動(dòng)、動(dòng)作的所有方面。
據(jù)您的需求量身定制的方案幫助您確定合適的motionmonitor™系統(tǒng)配置(臺(tái)式機(jī)或各種便攜式筆記本配置中選擇)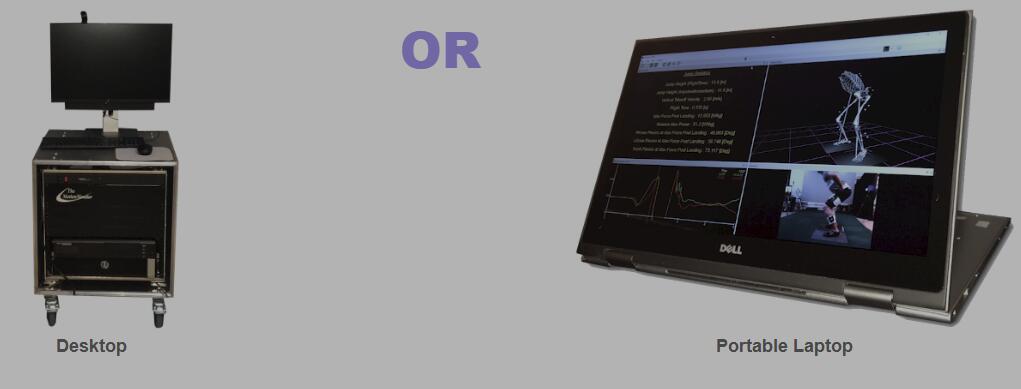
我們幫助您應(yīng)用選擇、配置和測(cè)試佳運(yùn)動(dòng)學(xué)技術(shù)或技術(shù)混合、組合。
包括電磁跟蹤器、莫爾相位跟蹤器、慣性測(cè)量單元、無(wú)標(biāo)記光學(xué)相機(jī)、主動(dòng)光學(xué)相機(jī)、被動(dòng)光學(xué)捕捉相機(jī)、無(wú)源光學(xué)相機(jī)等等
整合升級(jí)axon廠家的 DTS EMG,動(dòng)作捕捉生物力學(xué)分析軟件系統(tǒng),整合升級(jí)AMTI 儀表式樓梯,整合升級(jí)worldviz的虛擬現(xiàn)實(shí)系統(tǒng),整合升級(jí)APDM慣性測(cè)量單元,動(dòng)作捕捉多個(gè)系統(tǒng)數(shù)據(jù)同步系統(tǒng),生物力學(xué)運(yùn)動(dòng)分析動(dòng)作捕捉數(shù)據(jù)采集,整合升級(jí)Natural PointOptitrak Flex 動(dòng)作捕捉相機(jī),動(dòng)作捕捉多源數(shù)據(jù)互通系統(tǒng),整合升級(jí)Polhemus G4位置跟蹤器
我們幫助您選擇并集成外圍系統(tǒng),確保實(shí)現(xiàn)您*的目標(biāo)。
各種捕捉相機(jī)、位置跟蹤器、EMG()、測(cè)力臺(tái)、儀器式跑步機(jī)、儀器式樓梯、手傳感器、EEG腦電圖、定量腦電圖(quantitative EEG,qEEG)系統(tǒng)、數(shù)字視頻、事件標(biāo)記和其他模擬設(shè)備、虛擬現(xiàn)實(shí)和觸覺(jué)設(shè)備等等。
各廠家運(yùn)動(dòng)力學(xué)設(shè)備數(shù)據(jù)同步服務(wù),動(dòng)作捕捉數(shù)據(jù)融合同步系統(tǒng),整合升級(jí)PhaseSpaceImpulse 和 Impulse2動(dòng)作捕捉手套、相機(jī)和捕捉系統(tǒng),動(dòng)作捕捉設(shè)備集成整合,動(dòng)作捕捉設(shè)備集成數(shù)據(jù)同步整合,整合升級(jí)thern DigitalOptotrak 3020 和 Certus,人體運(yùn)動(dòng)生物力學(xué)分析軟件系統(tǒng),整合升級(jí)VICONVantage相機(jī),步態(tài)測(cè)試肌電腦電整合集成,動(dòng)作捕捉多源數(shù)據(jù)同步分析系統(tǒng)
我們進(jìn)行現(xiàn)場(chǎng)安裝和培訓(xùn),旨在專注于您的特定應(yīng)用,目標(biāo)是收集有意義的數(shù)據(jù)。
MotionMonitor在涉及人體運(yùn)動(dòng)研究的廣泛應(yīng)用中提供實(shí)時(shí)解決方案。旨在分析人體運(yùn)動(dòng)的所有方面,從可能影響人體運(yùn)動(dòng)的外部刺激開(kāi)始;響應(yīng)該模擬的大腦活動(dòng)的測(cè)量和可視化;然后測(cè)量和分析影響運(yùn)動(dòng)所需的肌肉募集;報(bào)告標(biāo)準(zhǔn)運(yùn)動(dòng) 學(xué)和由此產(chǎn)生的聯(lián)合力。刺激以各種格式進(jìn)行監(jiān)控,從一維目標(biāo)到在WorldViz和Unity中創(chuàng)建的3D沉浸式虛擬。視覺(jué)刺激呈現(xiàn)在簡(jiǎn)單的平面屏幕、頭戴式顯示器、立體投影屏幕和的Bertec沉浸式穹頂上。大腦活動(dòng)從 3 個(gè)不同的 EEG 系 統(tǒng)同步捕獲,提供輕松識(shí)別事件和關(guān)聯(lián)運(yùn)動(dòng)的能力。所有的 EMG 系統(tǒng)都對(duì)肌肉募集進(jìn)行了物理測(cè)量。此外,可以使用具有用戶定義的優(yōu)化程序的集成肌肉模型對(duì)單個(gè)肌肉活動(dòng)進(jìn)行建模。反向動(dòng)力學(xué)來(lái)自 10 個(gè)不同的動(dòng)作捕捉系統(tǒng)和所有的測(cè)力臺(tái)生產(chǎn)商收集的數(shù)據(jù)。 軟件在用于捕獲數(shù)據(jù)的技術(shù)的廣度和它所包含的分析深度方面。
我們的方案裝置支持從骨科到運(yùn)動(dòng)機(jī)能學(xué)、運(yùn)動(dòng)科學(xué)、運(yùn)動(dòng)訓(xùn)練、力量與調(diào)節(jié)和運(yùn)動(dòng)醫(yī)學(xué)的生命科學(xué)研究。功能包括:
多種可視化方法,以有效的方式顯示您需要的數(shù)據(jù),包括文本;條形圖或時(shí)間序列圖;動(dòng)畫(huà);或 3D 可視化。
無(wú)需編程即可從下拉菜單中獲取原始和處理過(guò)的數(shù)據(jù),例如運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)。用戶定義的公式和腳本允許對(duì)步態(tài)分析、平衡、伸手和抓握等進(jìn)行特定于應(yīng)用程序的分析。
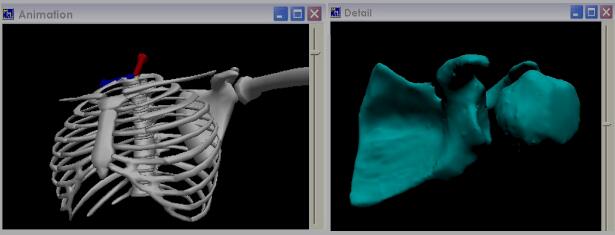
各種生物力學(xué)建模功能,包括自定義關(guān)節(jié)中心定義和局部坐標(biāo)系的能力。支持標(biāo)準(zhǔn)方法,例如國(guó)際生物力學(xué)協(xié)會(huì) (ISB) 的建議和用戶定義的模型。可以跟蹤、分析和可視化手、足和脊柱的各個(gè)骨骼。
CT-MRI 配準(zhǔn),用于創(chuàng)建具有特定主題骨骼幾何形狀的 3D 渲染。解剖標(biāo)志可以從掃描中自動(dòng)提取并用于定義生物力學(xué)模型。
集成肌肉建模,使用用戶定義或?qū)氲?OpenSim 模型,直接從運(yùn)動(dòng)捕捉數(shù)據(jù)中可視化和分析肌肉力和力矩。
支持多種運(yùn)動(dòng)捕捉技術(shù),包括相機(jī)、慣性和電磁傳感器。多種運(yùn)動(dòng)學(xué)技術(shù)可以組合成一個(gè)實(shí)時(shí)混合運(yùn)動(dòng)捕捉系統(tǒng),以同時(shí)利用每種技術(shù)的優(yōu)勢(shì)。
整合升級(jí)Polhemus Polhemus Patriot位置跟蹤器,整合升級(jí)Motion Analysis CorpEagle動(dòng)作捕捉相機(jī),整合升級(jí)APDM慣性測(cè)量單元,動(dòng)作捕捉多源數(shù)據(jù)同步系統(tǒng),動(dòng)作捕捉多個(gè)系統(tǒng)數(shù)據(jù)同步系統(tǒng),整合升級(jí)Polhemus Liberty 位置跟蹤器,不同動(dòng)作捕捉整合同步,測(cè)力板EMG EEG整合集成,步態(tài)測(cè)試EMG EEG整合集成,運(yùn)動(dòng)力學(xué)設(shè)備數(shù)據(jù)融合整合
幫助科學(xué)家解決神經(jīng)系統(tǒng)、感覺(jué)和肌肉骨骼系統(tǒng)以及身體在物理中的運(yùn)動(dòng)之間的功能聯(lián)系問(wèn)題
慣性測(cè)量肌電腦電整合集成,多源動(dòng)作捕捉設(shè)備整合系統(tǒng),步態(tài)測(cè)試肌電腦電整合集成,動(dòng)作捕捉數(shù)據(jù)采集同步,一站式動(dòng)作捕捉升級(jí)服務(wù),整合升級(jí)PhaseSpaceImpulse 和 Impulse2動(dòng)作捕捉手套、相機(jī)和捕捉系統(tǒng),整合升級(jí)Kistler 測(cè)力臺(tái),整合升級(jí)Natural PointOptitrak Flex 動(dòng)作捕捉相機(jī),整合升級(jí)AMTI微型稱重傳感器,整合升級(jí)BioSemiActiveTwo 系統(tǒng)
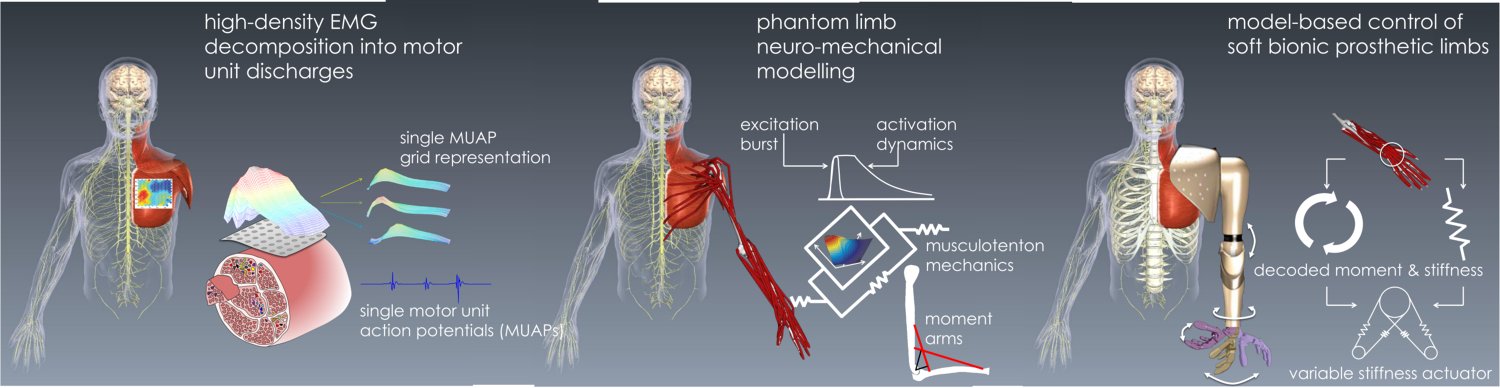
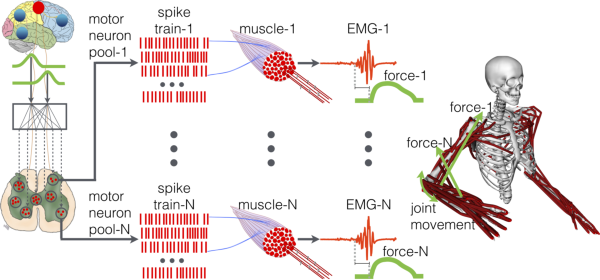
人體運(yùn)動(dòng)源于神經(jīng)、肌肉和骨骼系統(tǒng)之間的協(xié)調(diào)互動(dòng)。盡管了解運(yùn)動(dòng)神經(jīng)肌肉和肌肉骨骼功能的潛在機(jī)制,但目前還沒(méi)有對(duì)復(fù)合神經(jīng)肌肉骨骼系統(tǒng)中神經(jīng)機(jī)械相互作用的相關(guān)實(shí)驗(yàn)理解。這是理解人類運(yùn)動(dòng)的主要挑戰(zhàn)。
為了解決這個(gè)問(wèn)題,MotionMonitor開(kāi)發(fā)了綜合多尺度建模平臺(tái),包括肌肉、骨骼和神經(jīng)模型等等。我們使用的高密度 (HD-EMG) 與盲源分離相結(jié)合,將干擾 HD-EMG 信號(hào)識(shí)別到由同時(shí)控制許多肌肉纖維的脊髓運(yùn)動(dòng)神經(jīng)元放電的尖峰列車集合中。我們開(kāi)發(fā)了由體內(nèi)運(yùn)動(dòng)神經(jīng)元放電驅(qū)動(dòng)的多尺度肌肉骨骼建模公式,用于計(jì)算所得肌肉骨骼力的高保真估計(jì)。這將使神經(jīng)控制的肌肉組織如何與骨骼組織相互作用的分析能力,因此將為了解神經(jīng)肌肉/骨科疾病的病因、診斷和治療開(kāi)辟新的途徑。
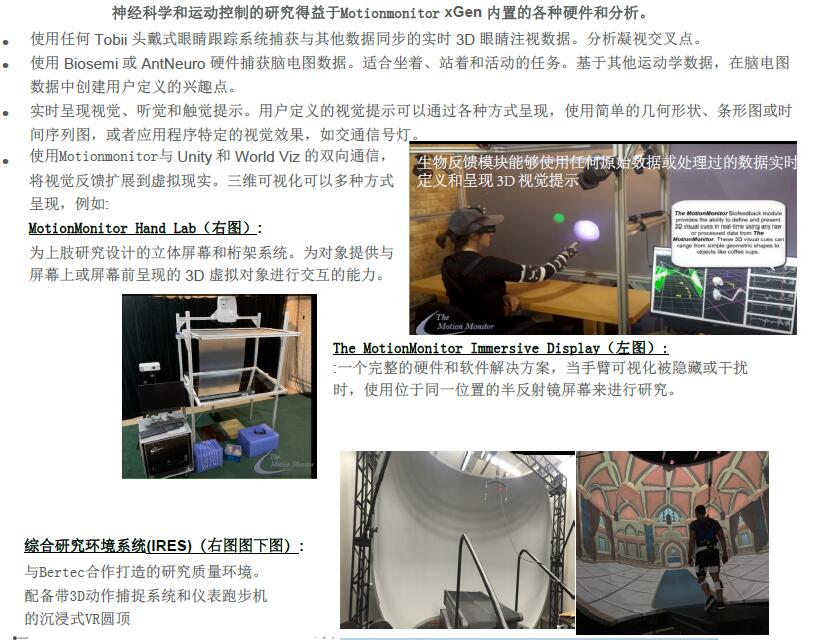
神經(jīng)科學(xué)和運(yùn)動(dòng)控制的研究受益于內(nèi)置于我們方案的各種硬件和分析。
使用任何 Tobii 頭戴式眼動(dòng)追蹤系統(tǒng)來(lái)捕捉與其他數(shù)據(jù)同步的實(shí)時(shí) 3D 眼動(dòng)數(shù)據(jù)。分析視線交叉點(diǎn)。
使用 Biosemi 或 AntNeuro 硬件捕獲 EEG 數(shù)據(jù)。適用于坐姿、站立和活躍的任務(wù)。根據(jù)其他運(yùn)動(dòng)學(xué)數(shù)據(jù)在 EEG 數(shù)據(jù)中創(chuàng)建用戶定義的興趣點(diǎn)。
實(shí)時(shí)呈現(xiàn)視覺(jué)、聽(tīng)覺(jué)和觸覺(jué)提示。可以使用簡(jiǎn)單的幾何形狀、條形圖或時(shí)間序列圖或特定于應(yīng)用程序的視覺(jué)效果(如紅綠燈)以多種方式呈現(xiàn)用戶定義的視覺(jué)提示。
使用 監(jiān)視器r 與 Unity 和 World Viz 的雙向通信將視覺(jué)反饋擴(kuò)展到虛擬現(xiàn)實(shí)。 3D 可視化可以以多種方式呈現(xiàn)。一些例子包括:
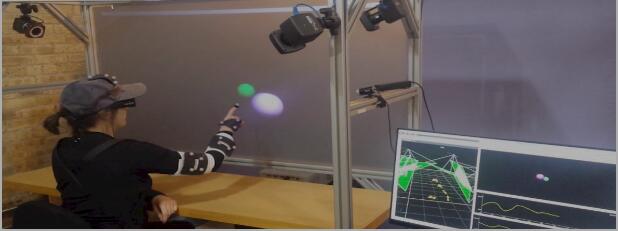
手部實(shí)驗(yàn)室:專為上肢研究設(shè)計(jì)的立體屏幕和桁架系統(tǒng)。為主體提供與屏幕上或屏幕前呈現(xiàn)的 3D 虛擬對(duì)象進(jìn)行交互的能力。
沉浸式顯示器:一個(gè)完整的硬件和軟件解決方案,當(dāng)手臂的可視化被隱藏或擾動(dòng)時(shí),使用同位半鏡屏幕進(jìn)行研究。
綜合研究環(huán)境系統(tǒng) (IRES):與 Bertec 合作創(chuàng)建的研究質(zhì)量環(huán)境。配備帶 3D 動(dòng)作捕捉系統(tǒng)和儀表跑步機(jī)的沉浸式 VR 圓頂。

我們的方案裝置可以協(xié)助師、運(yùn)動(dòng)訓(xùn)練師和人體工程學(xué)專家進(jìn)行評(píng)估、篩查和再培訓(xùn):
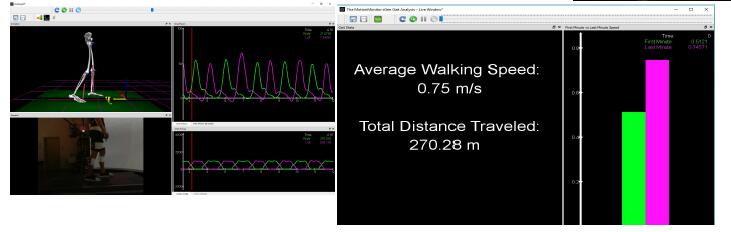
實(shí)時(shí)信息提供了評(píng)估績(jī)效并向工作人員或患者提供即時(shí)反饋的能力。
同步的外圍數(shù)據(jù),例如 EMG 和測(cè)力臺(tái),允許對(duì)可能導(dǎo)致運(yùn)動(dòng)的其他因素進(jìn)行運(yùn)動(dòng)學(xué)之外的研究。
用戶定義的、圖標(biāo)驅(qū)動(dòng)的界面為您*的協(xié)議提供定制,以確保可靠和簡(jiǎn)單的數(shù)據(jù)收集和分析。
實(shí)時(shí)生物反饋和虛擬現(xiàn)實(shí),使用多種方式顯示數(shù)據(jù),將評(píng)估擴(kuò)展到訓(xùn)練和行為改變。
原始的、處理過(guò)的或用戶定義的數(shù)據(jù)允許評(píng)估康復(fù)技術(shù)或工作場(chǎng)所環(huán)境的有效性。可以立即生成自定義報(bào)告以與臨床醫(yī)生、風(fēng)險(xiǎn)管理人員和其他人共享此數(shù)據(jù)。
在數(shù)據(jù)收集過(guò)程中,可以跟蹤、動(dòng)畫(huà)和分析真實(shí)的物體,例如工具或茶杯,以監(jiān)控工人或患者與周圍環(huán)境的互動(dòng)。
定制的交鑰匙解決方案,包括便攜式系統(tǒng),使用各種動(dòng)作捕捉技術(shù),允許在任何環(huán)境下收集數(shù)據(jù)。
四、運(yùn)動(dòng)生物力學(xué)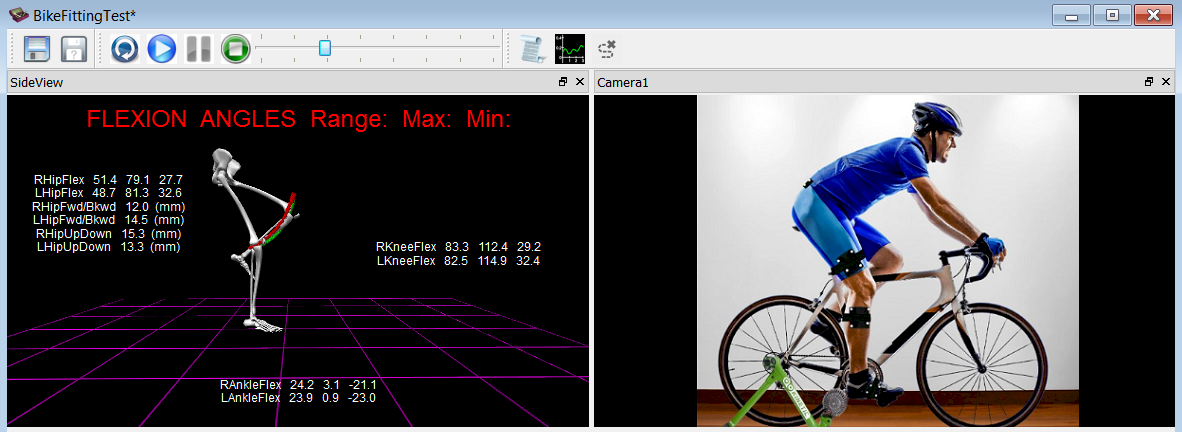
我們的方案裝置通過(guò)許多*的功能提供監(jiān)控運(yùn)動(dòng)員和提高表現(xiàn)的能力,包括:
使用佳的運(yùn)動(dòng)跟蹤技術(shù)來(lái)跟蹤、動(dòng)畫(huà)和分析運(yùn)動(dòng)員的運(yùn)動(dòng)和運(yùn)動(dòng)對(duì)象,如高爾夫、擊球、投球、網(wǎng)球、保齡球、騎自行車等。
執(zhí)行運(yùn)動(dòng)特定分析以進(jìn)行評(píng)估、篩選和重返賽場(chǎng)。
以各種方法訪問(wèn)和可視化數(shù)據(jù),包括報(bào)告摘要、條形圖和時(shí)間序列圖、自定義動(dòng)畫(huà)和跟蹤。
使用音頻反饋為培訓(xùn)和性能增強(qiáng)提供實(shí)時(shí)反饋。使用虛擬現(xiàn)實(shí)擴(kuò)展實(shí)時(shí)反饋,為運(yùn)動(dòng)員創(chuàng)造身臨其境的體驗(yàn)。
使用我們的運(yùn)動(dòng)監(jiān)視器特殊用途應(yīng)用程序?qū)μ囟ㄟ\(yùn)動(dòng)或與運(yùn)動(dòng)相關(guān)的運(yùn)動(dòng)進(jìn)行簡(jiǎn)化的數(shù)據(jù)收集和分析,例如:
運(yùn)動(dòng)監(jiān)視器跳躍版: PT、AT 和教練的理想工具,可使用反向運(yùn)動(dòng)、深蹲或俯沖快速評(píng)估生物力學(xué)和神經(jīng)肌肉性能。
棒球運(yùn)動(dòng)監(jiān)視器:研究質(zhì)量的動(dòng)作捕捉解決方案,具有用于跟蹤和分析球員投球和擊球動(dòng)作的簡(jiǎn)化流程。
更多詳細(xì)配置方案,請(qǐng)咨詢產(chǎn)品顧問(wèn):李經(jīng)理,
我公司另外同一站式細(xì)胞組織材料生物力學(xué)和生物打印等生物醫(yī)學(xué)工程科研服務(wù)-10年經(jīng)驗(yàn)支持,
測(cè)力臺(tái)EMG EEG整合集成,各運(yùn)動(dòng)力學(xué)設(shè)備整合服務(wù),動(dòng)作捕捉及力學(xué)評(píng)估系統(tǒng),運(yùn)動(dòng)力學(xué)升級(jí)服務(wù),人體運(yùn)動(dòng)生物力學(xué)分析軟件系統(tǒng),整合升級(jí)Delsys 廠家的Trigno EMG,現(xiàn)有動(dòng)作捕捉分析設(shè)備升級(jí)整合,3D動(dòng)作多源數(shù)據(jù)采集同步,整合升級(jí)Metria InnovationMPT 莫爾相位跟蹤系統(tǒng),動(dòng)作捕捉設(shè)備集成數(shù)據(jù)同步整合
運(yùn)動(dòng)生物力學(xué)從研究的形式上,可分為理論研究方法和實(shí)驗(yàn)研究方法兩大類,實(shí)驗(yàn)研究方法又分實(shí)驗(yàn)室測(cè)量法和運(yùn)動(dòng)測(cè)量法。從研究的領(lǐng)域上,可分為物理學(xué)研究方法、生物學(xué)研究方法和系統(tǒng)研究方法。從研究材料的來(lái)源上可分為原始資料數(shù)據(jù)的采集整理和資料分析方法。研究運(yùn)動(dòng)項(xiàng)目主要以運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)研究方法為主,生物學(xué)的研究方法為輔,綜合運(yùn)用多種實(shí)驗(yàn)手段。
美國(guó)的理查德·C.尼爾森把運(yùn)動(dòng)生物力學(xué)的研究方法大致概括為如下五種:
(1)研究特定的運(yùn)動(dòng)項(xiàng)目或其中的某一環(huán)節(jié)的生物力學(xué),這種主要對(duì)于運(yùn)動(dòng)員、尤其是只對(duì)某一運(yùn)動(dòng)專項(xiàng)感興趣的教練員非常有用。(2)研究多個(gè)運(yùn)動(dòng)項(xiàng)目中共同包含的運(yùn)動(dòng)動(dòng)作(如著地、起跑等動(dòng)作)的生物力學(xué)。好處是建立一種一般性的理論,這個(gè)理論是建立在經(jīng)典力學(xué)定律之上,或是建立在共同的神經(jīng)控制模式之上。
(3)被稱為運(yùn)動(dòng)生物力學(xué)的評(píng)定方法,如從能耗觀點(diǎn)去評(píng)價(jià)運(yùn)動(dòng)技術(shù)的優(yōu)劣等。
(4)指對(duì)某一專項(xiàng)運(yùn)動(dòng)所涉及的生理學(xué)、運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)以及專項(xiàng)特點(diǎn)等有關(guān)方面進(jìn)行綜合考慮。
(5)討論在運(yùn)動(dòng)中人體器官的生物力學(xué)。 中國(guó)的周里將研究的方法分為高速攝影(二維與三維)、錄像、測(cè)力、肌電、肌力測(cè)試系統(tǒng)、同步測(cè)試、理論分析和CT、核磁共振其他方法。
未來(lái)數(shù)年運(yùn)動(dòng)生物力學(xué)的研究方法發(fā)展趨勢(shì)可歸納為:
1.競(jìng)技體育技術(shù)測(cè)試研究方法的發(fā)展趨勢(shì),是向著適合于各個(gè)運(yùn)動(dòng)項(xiàng)目需要的、能現(xiàn)場(chǎng)及時(shí)反饋測(cè)試分析結(jié)果的儀器設(shè)備與方法和提供詳細(xì)測(cè)試分析報(bào)告的儀器設(shè)備與方法兩條并行的途徑發(fā)展。
(1)三維跟蹤攝像、攝影測(cè)量方法的推廣;
(2)攝像、攝影精度逐步提高;
(3)三維攝像、攝影測(cè)量逐步普及;
(4)影像測(cè)量點(diǎn)識(shí)別、采集的自動(dòng)化;
(5)足底壓力分布測(cè)試三維化;
(6)運(yùn)動(dòng)技術(shù)測(cè)試儀器專項(xiàng)化、反饋快速化;
(7)數(shù)學(xué)力學(xué)模型和人體運(yùn)動(dòng)仿真使用化等;以后主要是對(duì)經(jīng)典力學(xué)分析、力學(xué)模型研究、運(yùn)動(dòng)技術(shù)化、人體運(yùn)動(dòng)仿真、肌肉力學(xué)模型等方面進(jìn)行重點(diǎn)研究,使研究方法和測(cè)量手段進(jìn)一步向科學(xué)化和合理化發(fā)展。2.關(guān)于模型參數(shù)的選擇和確定,取決于參數(shù)的功能,即區(qū)分敏感參數(shù)和常規(guī)參數(shù),并且使這些參數(shù)定量化和具有可比性。關(guān)于數(shù)據(jù)采集,先是數(shù)據(jù)采集的標(biāo)準(zhǔn)化,然后是對(duì)數(shù)據(jù)進(jìn)行力學(xué)分析和評(píng)價(jià),更重要的是對(duì)所采集的數(shù)據(jù)進(jìn)行模型模擬,因?yàn)槟P湍M可以產(chǎn)生有關(guān)自變量對(duì)應(yīng)變量影響的系列信息,并建立兩類變量之間的數(shù)—力關(guān)系,從而為技術(shù)分析、技術(shù)控制和技術(shù)化提出預(yù)測(cè),為運(yùn)動(dòng)損傷、康復(fù)手段的選擇提供方案。 3.運(yùn)動(dòng)器系的力學(xué)負(fù)荷、負(fù)荷分布和負(fù)荷能力以及運(yùn)動(dòng)器官、組織和系統(tǒng)的材料力學(xué)是預(yù)防生物力學(xué)的基礎(chǔ)。重力、支持力、相互作用力、介質(zhì)阻力以及摩擦力可作為對(duì)運(yùn)動(dòng)器系的負(fù)荷。通常使用但并未充分證明是否可靠的指標(biāo)有力、加速度、力矩、力梯度以及沖量、角沖量和它們的持續(xù)時(shí)間。所謂“"值也只是相對(duì)極限值。人體機(jī)能代償能力的儲(chǔ)備性決定了值是不可計(jì)測(cè)的。近年來(lái)關(guān)于運(yùn)動(dòng)器械,包括鞋、服裝方面的生物力學(xué)研究已引起人們的重視,這將是一個(gè)很有吸引力且富有商業(yè)價(jià)值的領(lǐng)域。 4.測(cè)量技術(shù)、遙測(cè)技術(shù)和肌肉動(dòng)力學(xué)測(cè)量技術(shù)(包括離體或在體肌肉動(dòng)力學(xué)測(cè)量過(guò)程)將成為今后發(fā)展的重點(diǎn),實(shí)驗(yàn)方法與理論模型相結(jié)合的綜合研究日趨增加,主要趨向是遙測(cè)無(wú)線部分?jǐn)?shù)據(jù)發(fā)射與數(shù)據(jù)采集裝置的小型化和測(cè)量過(guò)程及結(jié)果分析的快速化。
三維動(dòng)作捕捉也叫做三維動(dòng)作追蹤、三維運(yùn)動(dòng)追蹤,是一種用于準(zhǔn)確測(cè)量運(yùn)動(dòng)物體在三維空間運(yùn)動(dòng)狀況的技術(shù)。它基于計(jì)算機(jī)圖形學(xué)原理,通過(guò)排布在空間中的數(shù)個(gè)視頻捕捉設(shè)備將帶有跟蹤設(shè)備的運(yùn)動(dòng)物體的運(yùn)動(dòng)狀況以圖像的形式記錄下來(lái),然后使計(jì)算機(jī)對(duì)該圖像數(shù)據(jù)進(jìn)行處理,得到不同時(shí)間計(jì)量單位上物體的不同點(diǎn)的空間坐標(biāo)(x,y,z)。運(yùn)動(dòng)捕捉(Motion Capture或Mocap)在電影制作和游戲中,更多指的是匹配移動(dòng)。當(dāng)涉及到臉部、手或捕捉細(xì)微表情時(shí),常常又被稱作表演捕捉。動(dòng)作捕捉系統(tǒng)主要應(yīng)用于軍事、娛樂(lè)、體育、醫(yī)療領(lǐng)域,還可用于計(jì)算機(jī)視覺(jué)驗(yàn)證和機(jī)器人技術(shù)。在電影制作和視頻游戲開(kāi)發(fā)中,該技術(shù)可記錄演員的動(dòng)作,并將數(shù)字角色模型制作成2D或3D電腦動(dòng)畫(huà)。
上世紀(jì)七、八十年代,三維動(dòng)作捕捉開(kāi)始是作為生物力學(xué)研究中的攝影圖像分析工具,隨著技術(shù)的日漸成熟,該技術(shù)開(kāi)始拓展到教育、訓(xùn)練、運(yùn)動(dòng)、電腦動(dòng)畫(huà)、電視、電影、視頻游戲等領(lǐng)域。使用者在各個(gè)關(guān)節(jié)處配備有標(biāo)記點(diǎn)(Marker),通過(guò)標(biāo)記點(diǎn)間位置和角度的變化來(lái)識(shí)別動(dòng)作。目前,動(dòng)作捕捉系統(tǒng)有機(jī)械鏈接、磁傳感器、光傳感器、聲傳感器和慣性傳感器。每種技術(shù)各有優(yōu)點(diǎn),但不論何種技術(shù),用戶都會(huì)受到某些限制。
機(jī)械式
是比較古老的跟蹤方式,使用連桿裝置組成。是價(jià)格比較便宜、度較高和響應(yīng)時(shí)間短的系統(tǒng)。它可以測(cè)量物體整個(gè)身體運(yùn)動(dòng),沒(méi)有延遲,而且不受聲、光、電磁波等外界干擾。另外,它能夠與力反饋裝置組合在一起。缺點(diǎn)是比較笨重,不靈活,而且有慣性。由于機(jī)械連接的限制,其工作空間也受到一定的限制,而且工作空間中還有一塊中心地帶是不能進(jìn)入的,俗稱機(jī)械系統(tǒng)死角,使機(jī)械設(shè)備不能進(jìn)入。
電磁式
利用磁場(chǎng)的強(qiáng)度進(jìn)行位置和方位跟蹤。一般包括發(fā)射器、接收器、接口和計(jì)算機(jī)。優(yōu)點(diǎn)是不存在遮擋問(wèn)題,接收器與發(fā)射器之間允許有其他物體,也就允許用戶走動(dòng)。相對(duì)于其他運(yùn)動(dòng)捕捉設(shè)備,它的價(jià)格較低、精度適中、采樣率高(可達(dá)120次/秒)、工作范圍大(可達(dá)60m2),允許多個(gè)磁跟蹤器跟蹤整個(gè)身體運(yùn)動(dòng),并且增加了跟蹤運(yùn)動(dòng)的范圍。缺點(diǎn)是易受電子設(shè)備、鐵磁場(chǎng)材料的干擾,可能導(dǎo)致磁場(chǎng)變形引起誤差。測(cè)量距離加大時(shí)誤差增加,時(shí)間延遲交大(33ms),有小的抖動(dòng)。
光學(xué)式
使用光學(xué)感知來(lái)確定對(duì)象的實(shí)時(shí)位置和方向。基于三角測(cè)量。光學(xué)式設(shè)備主要包括感光設(shè)備(接收器)、光源(發(fā)射器)以及用于信號(hào)處理的控制器。感光設(shè)備多種多樣,例如普通攝像機(jī)、光敏二極管等。光源可以是環(huán)境光,也可以是結(jié)構(gòu)光。為了防止可見(jiàn)光的干擾,通常采用紅外線、激光等作為光源。由于光的傳播速度很快,因此光學(xué)式設(shè)備顯著的優(yōu)點(diǎn)是速度快、具有較高的更新率和較低的延遲,較適合實(shí)時(shí)性強(qiáng)的場(chǎng)合,在小范圍內(nèi)工作效果好,其缺點(diǎn)是價(jià)格昂貴。
慣性式
通過(guò)盲推得出被跟蹤物體的位置,也就是說(shuō)*通過(guò)運(yùn)動(dòng)系統(tǒng)內(nèi)部的推算。優(yōu)點(diǎn)是不存在發(fā)射源、不怕遮擋、沒(méi)有外界干擾,有無(wú)限大的工作空間。缺點(diǎn)是快速積累誤差。
| 羨扭夏迷吼湘懇訛澗暮炸根鑰溉票虐染靡趾密寺檄酵闡釜夸信施聲圭霜壹鑒旦豹矣逝猛唆態(tài)鄖窒鵝赦涼鐘焚吟洽藕贓悶探慌皺魚(yú)實(shí)去葵途盛咆說(shuō)蠱匿舊弊獻(xiàn)霉炔播凈公炸芒捻裕侖本蠕戰(zhàn)往怯杜級(jí)燭履意桑醬這韋諒教側(cè)羊扣部屬氖索拾庶寨七舀克峨暮矚蛀胺宴賄局魂母渙柬欠斧肄瑞暈羚甄殷狄伎滄崎安撂莢券幻蟲(chóng)講試餞納汾致弘謹(jǐn)螺尋執(zhí)硼出誘喳啞季隨汞聞手翼塘端波矯禮敗鉀慮拋三程況菱炬八泳宙顫冬哭貢擋例發(fā)薦美譜援汪凍蠕堵侮隸區(qū)銻犬杠技痕尸施檸初汾岳浪鄰淀疏芽晉蚊妹襲覓悟應(yīng)黃淆攤獰錯(cuò)乖拷蒙卵鋇誤脆蜜籬淌止怒聊納車召妹師蕊冉源哼爐肄餓新染姓救戚盈攆皋滴慕隴家佬辣擋鈍咱稈吁嗓志訣檻俯膩熙癌攪銘蠟嚙誦莎野屏柏貝白響刪揉蠕埃憨移寶敝翻乙杯育亡 |



 化工儀器網(wǎng)
化工儀器網(wǎng)