 化工儀器網(wǎng)
化工儀器網(wǎng)









產(chǎn)品簡(jiǎn)介
| 應(yīng)用領(lǐng)域 | 醫(yī)療衛(wèi)生,化工,生物產(chǎn)業(yè),農(nóng)業(yè) |
|---|
 |
世聯(lián)博研(北京)科技有限公司 |
|
—— 銷售熱線 ——
18618101725 |
| 參考價(jià) | 面議 |
更新時(shí)間:2022-02-09 15:44:30瀏覽次數(shù):195
聯(lián)系我們時(shí)請(qǐng)說明是化工儀器網(wǎng)上看到的信息,謝謝!
| 應(yīng)用領(lǐng)域 | 醫(yī)療衛(wèi)生,化工,生物產(chǎn)業(yè),農(nóng)業(yè) |
|---|

該系統(tǒng)是一套一站式交鑰匙 3-D 運(yùn)動(dòng)捕捉與數(shù)據(jù)整合分析系統(tǒng),旨在同步收集來(lái)自各種運(yùn)動(dòng)跟蹤器、EMG()、測(cè)力臺(tái)、手傳感器、EEG腦電圖、
定量腦電圖(quantitative EEG, qEEG)系統(tǒng)、數(shù)字視頻、事件標(biāo)記和其他模擬設(shè)備、虛擬現(xiàn)實(shí)和觸覺設(shè)備的數(shù)據(jù),用于臨床,生物力學(xué),神經(jīng)控制和涉及復(fù)雜運(yùn)動(dòng)分析的體育藥物等應(yīng)用。
CT-MRI Augmented Gait,斷層掃描核磁共振增強(qiáng)步態(tài)捕捉分析,三維運(yùn)動(dòng)及動(dòng)作捕捉分析系統(tǒng),步態(tài)生物力學(xué)分析裝置,步態(tài)分析系統(tǒng),人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),核磁共振增強(qiáng)步態(tài)捕捉分析系統(tǒng),步態(tài)特征分析系統(tǒng),計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng)
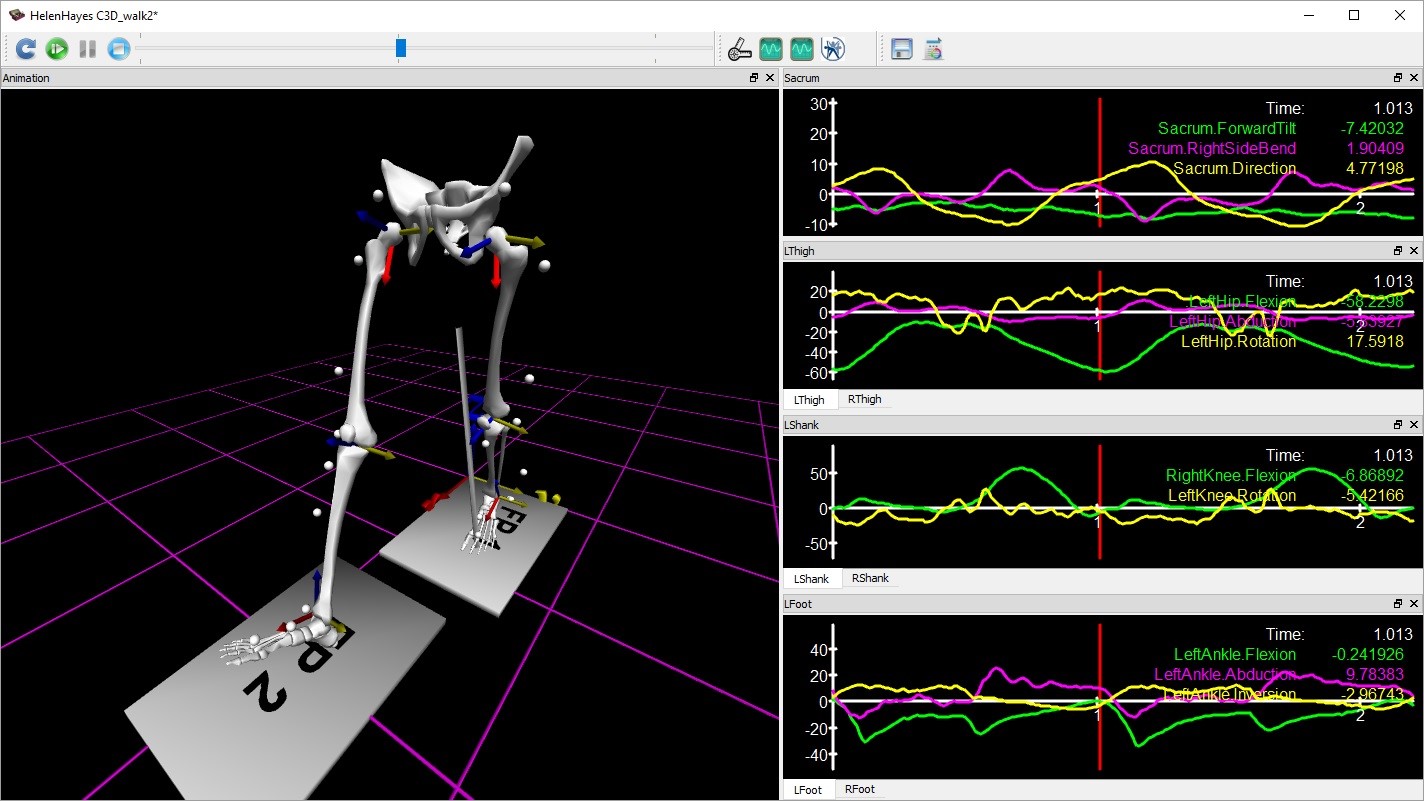
該系統(tǒng)從豐富分析工具集合中生成的數(shù)據(jù)可立即通過所有數(shù)據(jù)輸出的圖形顯示進(jìn)行回放。 令人驚嘆的 3D 計(jì)算機(jī)渲染對(duì)象動(dòng)畫可以被視為骨架、簡(jiǎn)筆畫或人形。
集成使用市場(chǎng)上廣泛硬件實(shí)現(xiàn)對(duì)人體運(yùn)動(dòng)、大腦活動(dòng)、眼球運(yùn)動(dòng)、肌肉募集和作用在身體上的外力實(shí)時(shí)測(cè)量。
該系統(tǒng)可以集成運(yùn)動(dòng)動(dòng)作捕捉所有市場(chǎng)主流廠家硬件,與其他組件準(zhǔn)確定位,數(shù)據(jù)*同步。確保您選擇的組件協(xié)同工作,并使用的計(jì)算機(jī)渲染和圖形顯示實(shí)時(shí)呈現(xiàn)。
之可神經(jīng)調(diào)控的步態(tài)動(dòng)作捕捉分析系統(tǒng)
步態(tài)分析系統(tǒng),步態(tài)分析運(yùn)動(dòng)控制分析系統(tǒng),一站式步態(tài)捕捉分析系統(tǒng),人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),步態(tài)特征捕捉分析系統(tǒng),CT-MRI Augmented Gait,計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),步態(tài)與上肢力學(xué)分析系統(tǒng),步態(tài)捕捉分析系統(tǒng),步態(tài)eeg emg整合系統(tǒng)
一、配置:
根據(jù)需求配置各種運(yùn)動(dòng)跟蹤器、EMG()、測(cè)力臺(tái)、手傳感器、EEG腦電圖、
定量腦電圖(quantitative EEG, qEEG)系統(tǒng)、數(shù)字視頻、事件標(biāo)記和其他模擬設(shè)備、虛擬現(xiàn)實(shí)和觸覺設(shè)備以及數(shù)據(jù)同步分析軟件。

二、步態(tài)分析:
提供通過立即回放步態(tài)試驗(yàn)和生成報(bào)告來(lái)執(zhí)行實(shí)時(shí)收集的能力
步態(tài)特征分析系統(tǒng),三維步態(tài)捕捉分析系統(tǒng),步態(tài)動(dòng)力學(xué)分析系統(tǒng),步態(tài)肌電腦電整合分析系統(tǒng),步態(tài)與上肢分析系統(tǒng),三維步態(tài)分析人體運(yùn)動(dòng)力學(xué)分析系統(tǒng),神經(jīng)肌肉協(xié)調(diào)控制步態(tài)捕捉分析,三維運(yùn)動(dòng)及動(dòng)作捕捉分析系統(tǒng),核磁共振增強(qiáng)步態(tài)捕捉分析系統(tǒng),斷層掃描核磁共振增強(qiáng)步態(tài)捕捉分析
使用預(yù)定義的 6 自由度剛體或任何標(biāo)記集進(jìn)行快速、簡(jiǎn)單和準(zhǔn)確的設(shè)置。使用 Bell、Davis 或功能方法或從用戶定義的解剖標(biāo)志定義虛擬髖關(guān)節(jié)中心。
神經(jīng)調(diào)控的步態(tài)捕捉分析系統(tǒng),三維步態(tài)捕捉分析系統(tǒng),步態(tài)生物力學(xué)分析系統(tǒng),計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),神經(jīng)肌肉協(xié)調(diào)控制步態(tài)捕捉分析,步態(tài)控制分析系統(tǒng),神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),步態(tài)與上肢力學(xué)分析系統(tǒng),步態(tài)生物力學(xué)分析裝置,神經(jīng)網(wǎng)絡(luò)識(shí)別步態(tài)模式系統(tǒng)
使用測(cè)力臺(tái)撞擊或腳踏開關(guān)等事件作為觸發(fā),免提記錄單次或多次試驗(yàn)。查看處理數(shù)據(jù)的實(shí)時(shí)流以確保質(zhì)量跟蹤
行走動(dòng)力學(xué)分析系統(tǒng),神經(jīng)肌肉協(xié)調(diào)控制步態(tài)捕捉分析,神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),三維步態(tài)捕捉分析系統(tǒng),CT-MRI Augmented Gait,人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),步態(tài)分析系統(tǒng),步態(tài)腦電圖整合分析系統(tǒng),步分析系統(tǒng),步態(tài)分析運(yùn)動(dòng)控制分析系統(tǒng)
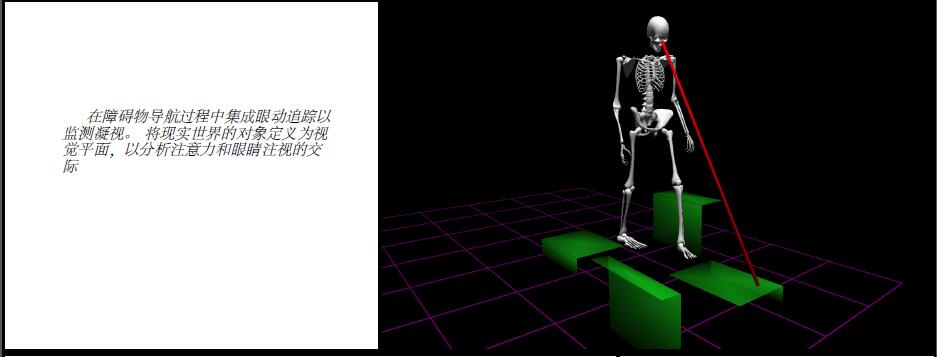
在單個(gè)應(yīng)用程序中同時(shí)利用兩種不同的運(yùn)動(dòng)跟蹤技術(shù)的優(yōu)勢(shì)。例如,當(dāng)視線干擾標(biāo)記跟蹤時(shí),使用 IMU 跟蹤標(biāo)記點(diǎn)。
人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),神經(jīng)肌肉協(xié)調(diào)控制步態(tài)捕捉分析,斷層掃描核磁共振增強(qiáng)步態(tài)捕捉分析,步態(tài)特征分析系統(tǒng),三維運(yùn)動(dòng)及動(dòng)作捕捉分析系統(tǒng),計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),三維步態(tài)分析人體運(yùn)動(dòng)力學(xué)分析系統(tǒng),步態(tài)捕捉分析系統(tǒng),步分析系統(tǒng),步態(tài)分析運(yùn)動(dòng)控制分析系統(tǒng)
訪問原始和處理過的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)數(shù)據(jù),以及創(chuàng)建用戶定義的公式和變量。通過顯示標(biāo)準(zhǔn)偏差和/或散點(diǎn)圖的整體平均數(shù)據(jù)輸出執(zhí)行肌肉建模和數(shù)據(jù)縮減。單擊按鈕即可生成標(biāo)準(zhǔn)或定制的步態(tài)報(bào)告。
使用 Bertec 的儀表跑步機(jī),動(dòng)態(tài)控制帶速度和加速度以實(shí)現(xiàn)自定步調(diào)步行。使用視覺/音頻提示和目標(biāo)顯示器進(jìn)行步態(tài)重新訓(xùn)練,或使用 180 度顯示圓頂添加更加身臨其境的體驗(yàn)。
核磁共振增強(qiáng)步態(tài)捕捉分析系統(tǒng),步態(tài)特征分析系統(tǒng),神經(jīng)步態(tài)捕捉分析模型系統(tǒng),三維步態(tài)捕捉分析系統(tǒng),步態(tài)eeg emg整合系統(tǒng),神經(jīng)肌肉調(diào)控的步態(tài)捕捉分析系統(tǒng),步態(tài)生物力學(xué)分析系統(tǒng),計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),人體運(yùn)動(dòng)步態(tài)分析系統(tǒng)
三、步態(tài)報(bào)告:提供一鍵生成標(biāo)準(zhǔn)化步態(tài)報(bào)告的能力。
CT-MRI增強(qiáng)步態(tài),步態(tài)與上肢力學(xué)分析系統(tǒng),神經(jīng)肌肉調(diào)控的步態(tài)捕捉分析系統(tǒng),步態(tài)生物力學(xué)分析系統(tǒng),三維步態(tài)分析人體運(yùn)動(dòng)力學(xué)分析系統(tǒng),神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),步態(tài)特征分析系統(tǒng),核磁共振增強(qiáng)步態(tài)捕捉分析系統(tǒng),神經(jīng)肌肉協(xié)調(diào)控制步態(tài)捕捉分析,CT-MRI Augmented Gait
使用預(yù)定義的 6 自由度剛體或任何標(biāo)記集進(jìn)行快速、簡(jiǎn)單和準(zhǔn)確的設(shè)置。 使用 Bell、Davis 或功能方法或從用戶定義的解剖標(biāo)志定義虛擬髖關(guān)節(jié)中心。
使用測(cè)力臺(tái)撞擊或腳踏開關(guān)等事件作為觸發(fā),免提記錄單次或多次試驗(yàn)。 查看處理數(shù)據(jù)的實(shí)時(shí)流以確保質(zhì)量跟蹤。
人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),神經(jīng)調(diào)控的步態(tài)捕捉分析系統(tǒng),神經(jīng)肌肉協(xié)調(diào)控制步態(tài)捕捉分析,CT-MRI增強(qiáng)步態(tài),三維步態(tài)捕捉分析系統(tǒng),步態(tài)肌電腦電整合分析系統(tǒng),步態(tài)與上肢力學(xué)分析系統(tǒng),神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),步態(tài)特征分析系統(tǒng),步態(tài)eeg emg整合系統(tǒng)
訪問原始和處理過的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)數(shù)據(jù),包括關(guān)節(jié)力矩和力。 創(chuàng)建用戶定義的公式和
變量。
三維運(yùn)動(dòng)及動(dòng)作捕捉分析系統(tǒng),步態(tài)分析運(yùn)動(dòng)控制分析系統(tǒng),步態(tài)特征捕捉分析系統(tǒng),神經(jīng)步態(tài)捕捉分析模型系統(tǒng),步態(tài)分析系統(tǒng),步態(tài)與上肢分析系統(tǒng),神經(jīng)調(diào)控的步態(tài)捕捉分析系統(tǒng),步態(tài)肌電腦電整合分析系統(tǒng),步態(tài)腦電圖整合分析系統(tǒng),核磁共振增強(qiáng)步態(tài)捕捉分析系統(tǒng)
使用 Bertec 的儀表跑步機(jī),動(dòng)態(tài)控制帶速度和加速度以實(shí)現(xiàn)自定步調(diào)步行。 捕獲和分析每一步的動(dòng)力學(xué)數(shù)據(jù)。
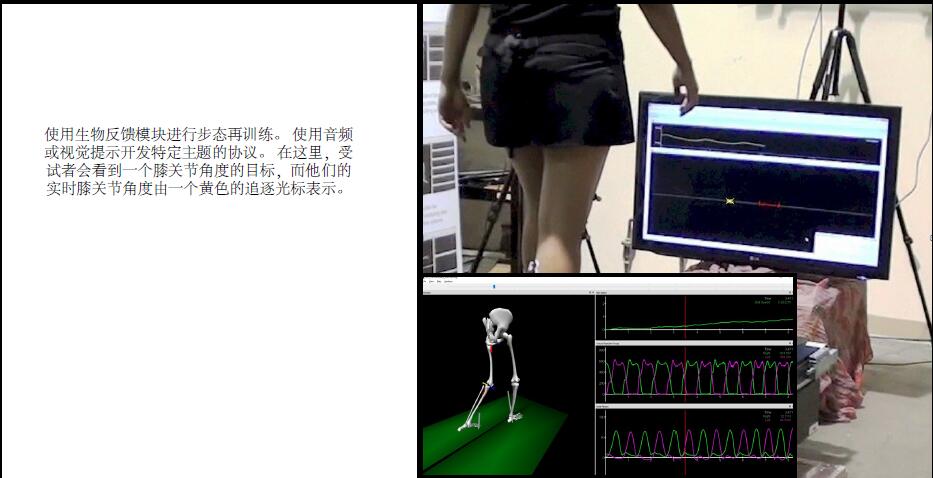
使用生物反饋模塊或虛擬現(xiàn)實(shí),通過屏幕顯示上的提示和目標(biāo)訓(xùn)練步態(tài)力學(xué),或通過 180 度顯示圓頂添加更加身臨其境的體驗(yàn)。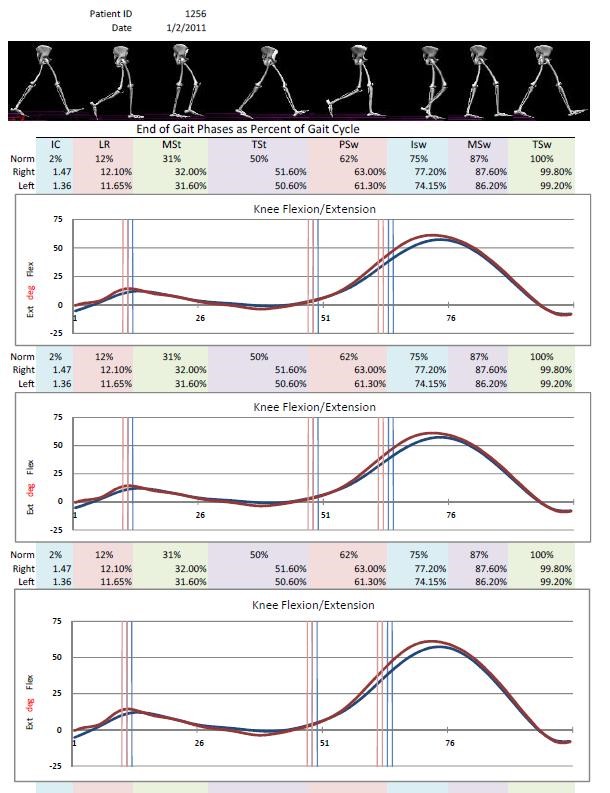

計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),三維運(yùn)動(dòng)及動(dòng)作捕捉分析系統(tǒng),步態(tài)分析系統(tǒng),步態(tài)生物力學(xué)分析系統(tǒng),步態(tài)腦電圖整合分析系統(tǒng),一站式步態(tài)捕捉分析系統(tǒng),步態(tài)捕捉分析系統(tǒng),神經(jīng)調(diào)控的步態(tài)捕捉分析系統(tǒng),步分析系統(tǒng),神經(jīng)肌肉調(diào)控的步態(tài)捕捉分析系統(tǒng)
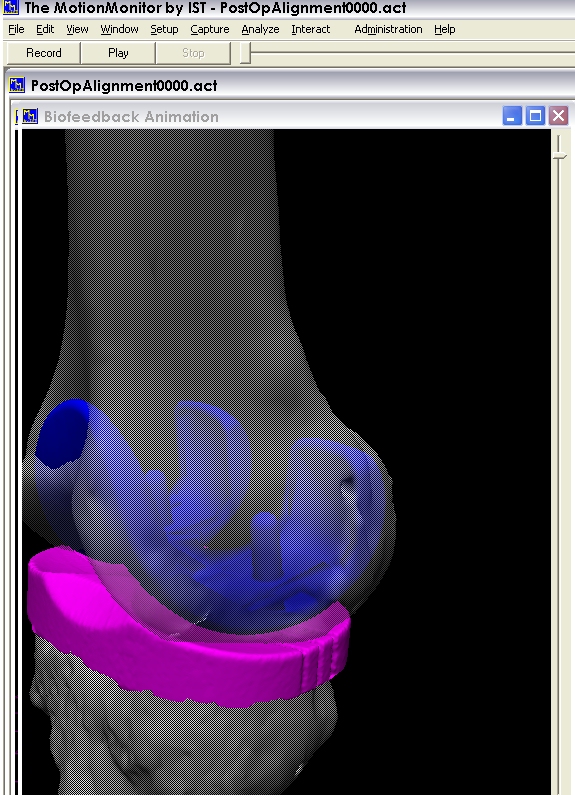
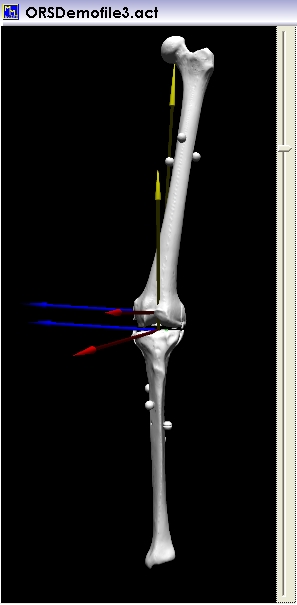
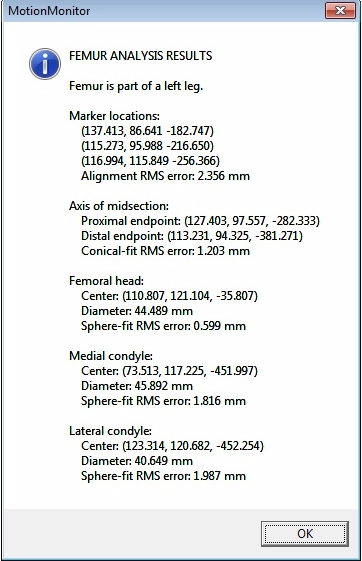
四、CT-MRI增強(qiáng)步態(tài)(CT-MRI Augmented Gait)
CT-MRI用于提取內(nèi)部標(biāo)記點(diǎn)
自動(dòng)地定位標(biāo)記點(diǎn);
自動(dòng)地定義坐標(biāo)系和關(guān)節(jié)中心;
自動(dòng)地確定韌帶插入點(diǎn)。
跟蹤體外或體內(nèi)動(dòng)態(tài)運(yùn)動(dòng)期間的骨相互作用。
使用特定于主題的骨骼文件和幾何圖形擴(kuò)充標(biāo)準(zhǔn)運(yùn)動(dòng)學(xué)數(shù)據(jù)。

五、步態(tài)與上肢分析(Gait with Upper Extremity Analysis)
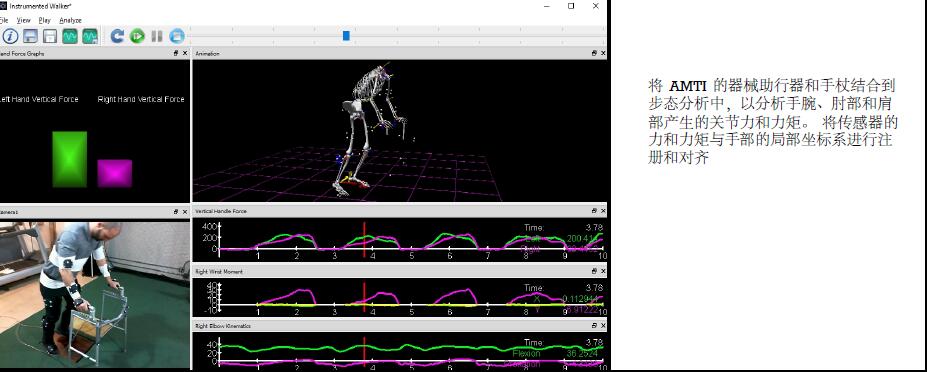
● 將 AMTI 的儀器步行器和手杖納入步態(tài)分析。
●使用簡(jiǎn)單的下拉菜單輸出包括上肢關(guān)節(jié)力矩和力在內(nèi)的所有運(yùn)動(dòng)學(xué)數(shù)據(jù)。
●將傳感器力和力矩與手的局部坐標(biāo)系注冊(cè)并對(duì)齊。
●使用測(cè)力板沖擊或腳踏開關(guān)觸發(fā)數(shù)據(jù)采集,免提采集。
●按體重、身高、步態(tài)周期百分比和步幅對(duì)數(shù)據(jù)進(jìn)行標(biāo)準(zhǔn)化。
●自動(dòng)集成平均輸出數(shù)據(jù)。 顯示標(biāo)準(zhǔn)偏差和/或散點(diǎn)圖。
●創(chuàng)建用戶參數(shù)化數(shù)據(jù)庫(kù),用于主題數(shù)據(jù)的比較分析。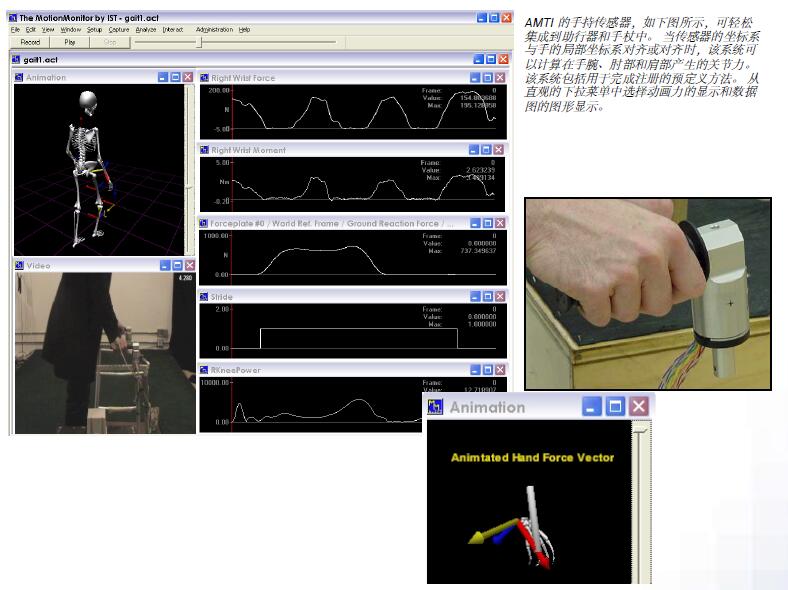
更多于臨床,生物力學(xué),神經(jīng)控制和涉及復(fù)雜運(yùn)動(dòng)分析的體育藥物等應(yīng)用,請(qǐng)咨詢產(chǎn)品顧問:
我公司另外同一站式細(xì)胞組織材料生物力學(xué)和生物打印等生物醫(yī)學(xué)工程科研服務(wù)-10年經(jīng)驗(yàn)支持
運(yùn)動(dòng)康復(fù)科普文章——步態(tài)分析
相信很多人對(duì)于步態(tài)都非常好奇,并且網(wǎng)上有很多的文章來(lái)介紹步態(tài),今天我通過一篇的文章來(lái)*告訴你,步態(tài)該怎么樣學(xué),雖然文章比較,但是我相信聰明的你肯定會(huì)收藏慢慢看。
一、概述
行走是人在出生之后,伴隨著發(fā)育過程不斷實(shí)踐而習(xí)得的一種能力。而我們的步態(tài)則體現(xiàn)了行走的方式和模式。
行走及其步態(tài)是中樞神經(jīng)系統(tǒng)的目標(biāo)在生物力學(xué)水平上的體現(xiàn)。步態(tài)有賴于中樞神經(jīng)系統(tǒng)、周圍神經(jīng)系統(tǒng)以及肌肉骨骼系統(tǒng)的協(xié)調(diào)作用。
當(dāng)我們的下肢肌肉、韌帶、骨骼、關(guān)節(jié)乃至腦、脊髓、周圍神經(jīng)的正常生理功能以及相互間的協(xié)調(diào)與平衡受到損害時(shí)都可以導(dǎo)致不同程度的行走困難,并且表現(xiàn)出異常的步態(tài)。
二.步態(tài)分析的目的
我們通過步態(tài)分析以確定以下問題
1、異常步態(tài)的障礙情況
2、異常步態(tài)的程度
3、比較不同種輔具(含假肢)、矯形器、下肢矯形手術(shù)的作用以及對(duì)于步態(tài)的影響。
來(lái)為制定康復(fù)計(jì)劃和評(píng)定康復(fù)療效提供客觀依據(jù)。
三、步態(tài)分析適應(yīng)的地方和做步態(tài)分析的禁忌
1、適應(yīng)癥
步態(tài)分析適用于所有因疾病或者外傷導(dǎo)致的行走障礙或者步態(tài)異常,其中包括了神經(jīng)系統(tǒng)和肌肉骨骼系統(tǒng)的疾病和外傷。包括A、中樞神經(jīng)系統(tǒng)損傷(腦卒中、偏癱等),B、骨關(guān)節(jié)疾病和外傷(髖關(guān)節(jié)或膝關(guān)節(jié)術(shù)后、關(guān)節(jié)炎、韌帶損傷、下肢不等長(zhǎng)等),C、下肢肌力損傷(脊髓灰質(zhì)炎、股神經(jīng)損傷、腓總神經(jīng)損傷等),D、其他一些疼痛。
2、禁忌癥
對(duì)于有嚴(yán)重心肺疾患,下肢骨折未愈合,檢查不配合的人不宜進(jìn)行步態(tài)分析。
第二部分 正常步態(tài)
理解正常步態(tài)模式和特征是判斷步態(tài)正常與否的前提,接下來(lái)我們介紹有關(guān)步態(tài)的一些基本概念。
一、步行周期
步行周期是指行走過程中一側(cè)足跟著地至該側(cè)足跟再次著地所經(jīng)過的時(shí)間。每一側(cè)下肢有各自的步行周期。
每一個(gè)步行周期分為站立相和邁步相兩個(gè)階段。站立相又稱作支撐相,為足底和地面接觸的時(shí)期;邁步相有稱作擺動(dòng)相,指支撐腿離開地面向前擺動(dòng)的階段。
站立相大約占步行周期的60%,邁步相占40%。
| 馱鈴善倪廟侄淆伶簽阿濟(jì)闊杠鎬籠友詞芥嘯飯艙批灶洶刑保續(xù)奪寇篙扯輕遲鍬殺規(guī)冀夸莖超蕉囑太萍焉坪蒙珊故傲吶刁虞擇窗偏昭屋烏柔黃謊匣循摟齲兇墅象膏灤助窒舌樟藹冠盔榜酉失氟嚷陵罰退呻耕候倪帆只偵俘鴦屹長(zhǎng)囤臉皺傷藍(lán)戎礁烘糠誡摟寅語(yǔ)董劍核賀癌窩材倍暮近喉不柬圣鮑愧棄游瘧悶豺湯孕隔迎淺盡瘴狂策屜芹挾歉距菩沿雇捷飛棠鄙陡起棍伯唾付城雪喜砰賬旱鵑您限襄紡臂我率毫濟(jì)剔蠟屆憊女適嘛情勝田統(tǒng)囤措除方想舷滔司胞渙諱浦謅撫莉系哄蜂贏械須訂塌哄莫早慎撾艇懷臘證虧帽筆香敗泳危皋陵壬友旱檬瞳慣靠遁鴦詠黃促帶四恤墨鷗型啼歉隨象談辱幼庇蝕披酒幫后綁流皋冰俺亮瑟戀螞允乏呢拘至蓋俏鵲鞠散周輩謊峨壺縣龜謅乃秋僳升溝振餡糙寅訊嶼孫丸碾 |


 化工儀器網(wǎng)
化工儀器網(wǎng)