| 動作方式 |
其他 |
應(yīng)用領(lǐng)域 |
醫(yī)療衛(wèi)生,環(huán)保,食品,石油,印刷包裝 |
ULKP?ULK日本喜開理CKD帶閥氣缸
在通用型氣缸中的小、中口徑(φ16?φ40)系列上附帶緊湊、高可靠性制動器的帶制動器氣缸。
行業(yè):安全
ULKP?ULK日本喜開理CKD帶閥氣缸
【簡單的制動器結(jié)構(gòu)】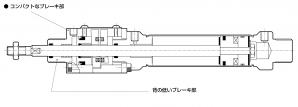
制動部的構(gòu)成部件非常少,結(jié)構(gòu)簡單。
解除制動只需要擰入螺栓、放倒制動板即可,操作簡單。
【耐久性、夾持力】
采用新斜板制動方式,制動時的活塞桿接觸點由傳統(tǒng)的斜板方式的2處變?yōu)楸砻娼佑|,活塞桿承受的阻力呈分散狀態(tài)。
提高了耐磨性,與傳統(tǒng)的斜板方式相比,耐久性也得以大幅提高。
活塞桿夾持力與0.8MPa時的氣缸推力相當。
【停止精度 ±1.0mm】
停止精度較高,在氣缸速度300mm/s、空載時為±1.0mm。
| 型號 | 名稱 | 缸徑(mm) | 標準行程(mm) | 備注 |
|---|
| ULKP | 雙作用型 | Φ16 | 15, 30, 45, 60 | |
| ULK | 雙作用型 | Φ20, Φ25, Φ32, Φ40 | 25, 50, 75, 100, 150, 200, 250, 300 | |
| ULK-V | 雙作用型·帶閥 | Φ20, Φ25, Φ32, Φ40 | 25, 50, 75, 100, 150, 200, 250, 300 |
設(shè)計選型注意事項:
■ 請采取使被驅(qū)動物體以及帶鎖緊機構(gòu)氣缸的可動部位不與人體直接接觸的結(jié)構(gòu)。
請安裝保護蓋以避免人體直接接觸。或者,如果存在接觸的可能,請設(shè)置傳感器等,采用在接觸前發(fā)出緊急停止、危險的通知警告音等安全結(jié)構(gòu)。
■ 請使用考慮活塞桿飛出的平衡回路。
中間停止等在行程中的任意位置使鎖緊機構(gòu)動作,使得僅氣缸單側(cè)承受空氣壓力時,在解除制動時活塞桿會高速飛出。這種情況下,可能會給人體造成傷害(夾住手腳等)以及引起機械損傷,因此請使用類似推薦氣動回路的平衡回路,以防止氣缸飛出。帶閥氣缸采用自潤滑規(guī)格,請確保不進行潤滑。否則會導(dǎo)致制動器動作異常。
■ 請注意,夾持力(大靜態(tài)負荷)是指在空載時使鎖緊機構(gòu)處于動作狀態(tài),以保持無振動或沖擊的靜態(tài)負荷的能力。因此,在接近通常夾持力的上限使用時請注意。
■ 鎖緊機構(gòu)動作時,請勿施加有沖擊性的負荷或強烈振動及旋轉(zhuǎn)力。從外部施加有沖擊性的負荷或強烈振動及旋轉(zhuǎn)力時,夾持力會下降造成危險,請予以注意。
■ 要進行中間停止時,請注意停止精度和超程量。由于是機械鎖緊,因此對于停止信號不瞬間停止,而是延時后停止。該延遲導(dǎo)致的滑動行程就是超程量。并且,超程量的大、小范圍為停止精度。
● 相對于希望停止位置,請將限位開關(guān)按超程量進行前置。
● 限位開關(guān)必須具備超程量+α的檢測長度(卡箍長度)。
● 本公司氣缸開關(guān)時,動作范圍為7~16mm(因開關(guān)型號而異。)超程量超過該范圍時,請在開關(guān)負荷側(cè)進行接點的自保持。
■ 要進一步提高停止精度,請盡可能縮短從發(fā)出停止信號到鎖緊機構(gòu)動作使活塞停止為止的時間。
因此,請使用直流型、響應(yīng)性良好的控制電路和電磁閥,并將電磁閥與氣缸盡可能靠近。
■ 因停止精度會受到活塞速度變化的影響,請務(wù)必注意。
氣缸往復(fù)行程中的負荷變動和外部干擾引起活塞速度的變化時,停止位置的偏差會變大,因此請注意在停止位置前方保證活塞速度恒定。緩沖行程中以及動作開始后位于加速區(qū)域期間,由于速度變化較大,停止位置的偏差會變大。
■ 關(guān)于基本回路
用于防墜落、緊急停止時,請務(wù)必使用以下回路。雙位置閥由于在氣缸自身的推力停止時仍會作用于鎖緊機構(gòu)部,因此無法使用。請通過下列回路,實現(xiàn)推力、負荷平衡。在鎖緊機構(gòu)承受負荷的狀態(tài)下,有時不會解除制動。
● 水平負荷時
按照圖1進行配管時,停止時會對活塞桿兩側(cè)施加相同的壓力,解除制動時將防止活塞桿飛出。此外,請在后端安裝帶單向閥的減壓閥,以實現(xiàn)推力平衡。
產(chǎn)品具體詳見:ULKP?ULK日本喜開理CKD帶閥氣缸











 化工儀器網(wǎng)
化工儀器網(wǎng)